无人船艇的组成结构和工作原理是实现其自主航行和任务执行的关键。以下是无人船艇的详细描述:组成结构:无人船艇通常由船体、传感器系统、自动控制系统、通信系统、动力系统等组成。其中,传感器系统用于感知周围环境,如水温、水位、流速等;自动控制系统用于控制船体的航行和任务执行;通信系统用于与岸上控制中心进行数据传输和指令接收;动力系统用于提供船只航行的动力。
工作原理:无人船艇的工作原理主要涉及航行控制和任务执行两个环节。在航行控制方面,无人船艇依靠传感器系统获取周围环境信息,通过自动控制系统进行分析和处理,生成航行指令,控制船体按照预定轨迹航行。
在任务执行方面,无人船艇可以根据任务需求配备不同的传感器和设备,如水下探测器、水质监测器、图像采集器等,通过自动控制系统执行相应的任务。 小豚智能致力于研发无人系统共性技术。遥控无人船艇厂家
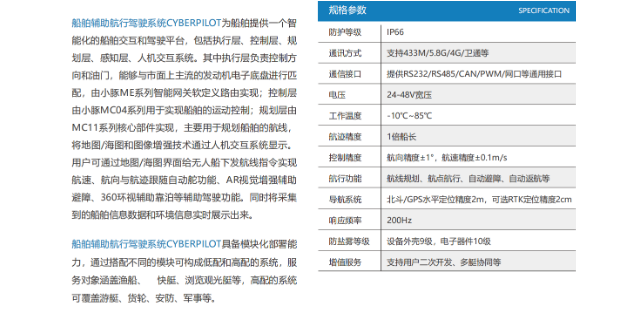
2020年,东莞小豚智能技术有限公司凭借“全自主无人艇关键技术及装备”项目,荣获松山湖创新创业大赛总决赛特等奖;2021年,其全自动无人艇亮相第八届中国(上海)国际技术贸易会,向参展嘉宾们展现松山湖“智造”的前沿“黑科技”……5年积累酝酿,专注于无人艇领域自主研发,小豚智能在近年取得多份亮眼成绩。近日,小豚智能正式搬迁入驻松山湖国际创新创业社区(下称“社区”),希望立足新平台加速汇集科创资源,开启发展的全新征程。从0到1开疆土研发成果填补国内无人技术领域空白浙江无轴推进器无人船艇是什么小豚智能自主研制的“智能船舶辅助驾驶系统CYBERPILOT”具备了模块化部署能力。

东莞小豚智能技术有限公司自2015年入驻工研院以来,在耿涛和团队的共同努力下,小豚智能完成了从产品研发、实验室建设到项目落地产业化发展。
在这一过程中,工研院为其提供了全链条的产业孵化服务,耿涛和团队的“科技人员实业报国”梦想逐步走进现实。他说道:“创业过程中每次遇到困难时,都是党员绝不轻言放弃的精神激励着我继续坚持下去。践行“蓝色信念”,以实业报国,把论文写在祖国的大地上是我选择实现人生价值的途径与利器。
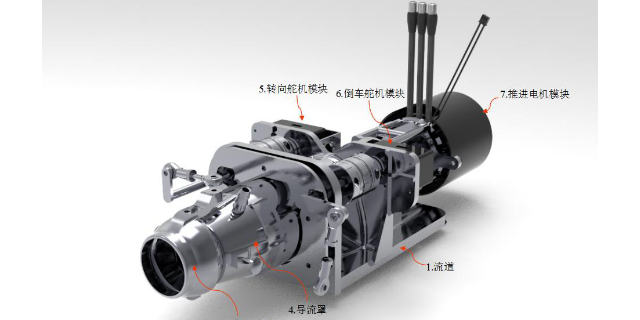
一种无人船中心动力部件-无轴推进器。现有的船舶推进器,包括传统的舵桨推进、吊舱推进器、喷水推进器等大都是通过发动机带动螺旋桨叶片转动产生推力。
基于船体布置的考虑,船舶主机和螺旋桨之间需要轴系进行传动,轴系传动导致在传递过程中损耗增大,传动效率降低,轴系还会占据大量船舱空间,降低船舱利用效率。推进轴系对于水密工艺要求较高,导致结构日趋复杂,增大船舶的设计和制造难度。同时,对于某些有特定用途的水下航行器来说,轴系震动会带来大量噪声,不利于任务的执行。而小豚自研推进器恰恰解决了这些问题 中国“无人船新势力”东莞小豚智能在成立之初就采取了促进无人船行业繁荣,共建行业生态的模式。

耿涛表示,前身为广东省创新科研团队--全自主无人艇关键技术研究创新团队的小豚智能,目前在无人船环境感知、路径规划与自主控制、多艇协同等方面已突破了一批共性技术和功能部件,拥有各类知识产权40余件。然而,实现技术创新只是第一步。背靠东莞这座制造业重镇,进一步为小豚智能将创新技术从实验室带向市场提供了“变现路径”。谈及落户东莞的原因,耿涛直言,“我们更看重的是东莞包括整个珠三角地区的供应链和营商环境。”据悉,目前小豚智能在松山湖共拥有1400平方米的研发场地和1600平方米的生产场地,其中硬件设备制造主要外包给合作厂商负责。“(制造商)多得是,上下游企业都有。”耿涛表示。耿涛团队在业内率先提出“全自主无人艇”概念。当时,国内无人艇技术研究仍处于初级阶段。遥控无人船艇厂家
实现了水产养殖智能化、数字化的无人作业模式,船舶智能化改造。遥控无人船艇厂家
时间拨回2016年2月,“全自主无人艇关键技术研究创新团队”获批“广东省创新团队”,随后在广东华中科技大学工业技术研究院(下称“工研院”)的引进下,正式到松山湖开启创业之旅。耿涛则是团队成员及工程团队负责人。这是先个提出“全自主无人艇”概念的团队。当时,国内无人艇技术研究仍处于初级阶段,他们便决定要将理论研究转化为实际应用,实现产业化。虽然只有近10人规模,但他们在无人驾驶、环境感知、自主控制等技术领域积累了丰富经验。2016年底,研制成功HUSTER-12S;不到一年时间,便于国内先公开展示多艇协同技术。为继续推进技术研发与项目落地,五年间,团队在工研院建立和获批了“广东省全自主无人艇工程技术研究中心”及“东莞市全自主无人艇重点实验室”,并在松木山水库建立“全自主无人艇松山湖试验基地”,可用于常规的无人船(艇)试验。遥控无人船艇厂家