- 品牌
- 星火博特
- 型号
- 通用
随着深度学习和计算机视觉技术的不断进步,3D激光雷达导航在未来可能会得到更较广泛的应用和进一步的优化,为无人叉车等领域带来更多创新和突破。比如,3D激光雷达导航技术在各种环境下都具有较强的适用性,不受地形、光照等因素的限制,可以灵活应对不同的场景和任务需求。而激光导航可能受到地形复杂度和遮挡物的影响,需要在特定的环境下进行精确地地图构建和路径规划。机器视觉系统还可以通过不断的学习和优化,提高自身的检测精度和识别率。以人工智能驱动的机器视觉在内部物流管理方面具有多重优势,从提高准确性和效率到降低成本和增强安全性,这些技术的进步为现代物流领域带来了革新性的改变。杭州星火博特科技推出的3D库位检测系统通过自动定位、数据实时同步、精确库存控制等功能,优化库位资。苏州双目3D相机避障

该巡检机器人具备多传感融合定位技术,通过多组3D激光雷达SLAM融合,即使在环境发生变化的情况下,仍能保持厘米级定位精度。工业级AI视觉系统支持二维码识别和表计识别,实时传输巡检画面并自动生成数据报表。机器人还具备全天候运行可靠性,IP32以上防护等级确保在复杂工业环境中稳定作业。 3D激光雷达的抗室外强光特性,探测距离可达90米,且在室内昏暗与室外强光环境下性能一致出色,使巡检机器人能够无缝衔接不同光照环境,扩展了应用场景范围。 该巡检机器人在部署效率方面取得明显突破。2000平方米面积的部署时间需40分钟,极大降低了用户的使用门槛。同时,系统支持私有化部署,保护用户数据信息安全,解决了企业对敏感数据泄露的担忧。这款搭载3D激光雷达的巡检机器人已在多个领域展现出色适应性。在企业大型机房中,它能够实现无盲区覆盖,准确识别设备状态;在室内配电站和变电站等危险环境中,其增强的细小障碍物感知能力降低了运行风险;在大型厂房和地下建筑中,360°全向感知为安全运行提供了保证。佛山视觉3D相机扫描sparkbot团队推出的智能3D检测系统,有效弥补了单一传感器信息不足的弊端,进一步提升了托盘定。

场景:快递分拣中心,货架密集、分拣台众多,存在快递包裹、分拣筐、传送带、工作人员等障碍物,包裹堆放杂乱,人员流动频繁,需快速分拣且避免碰撞包裹与设备。技术说明:搭载sparkbot 3D ToF相机与3D激光雷达,融合3D ToF与dToF数据,实现远距离分拣台、货架的高精度探测与近距离快递包裹、分拣筐的广域覆盖。融合多源传感器数据,精确识别障碍物类别,区分包裹与设备、人员,构建分拣中心三维环境模型,深度优化系统延迟,面对包裹掉落、工作人员穿行等动态场景,实现毫秒级避障反应,智能适应室内光照变化与地面平整性,保障分拣机器人高效穿梭,准确分拣,避免损坏包裹。
场景:火灾现场、地震废墟,存在燃烧物、倒塌墙体、碎石、积水等障碍物,光线昏暗、烟雾浓厚,环境复杂且危险,需进入现场探查、救援,避免碰撞危险物体。技术说明:配备sparkbot 3D激光雷达与3D ToF相机,融合3D ToF与dToF数据,突破单一传感器在烟雾、昏暗环境下的局限,实现远距离倒塌墙体、燃烧物的高精度探测与近距离碎石、积水的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面安全性及可通行区域,构建灾害现场三维环境模型,优化系统延迟,应对墙体二次坍塌、火焰蔓延等动态场景,智能适应昏暗、烟雾环境与复杂地形,保障救援机器人安全进入现场,辅助消防救援。sparkbot团队将3D视觉、3D雷达等多传感器融合技术:如激光测距数据、视觉识别数据等,通过。
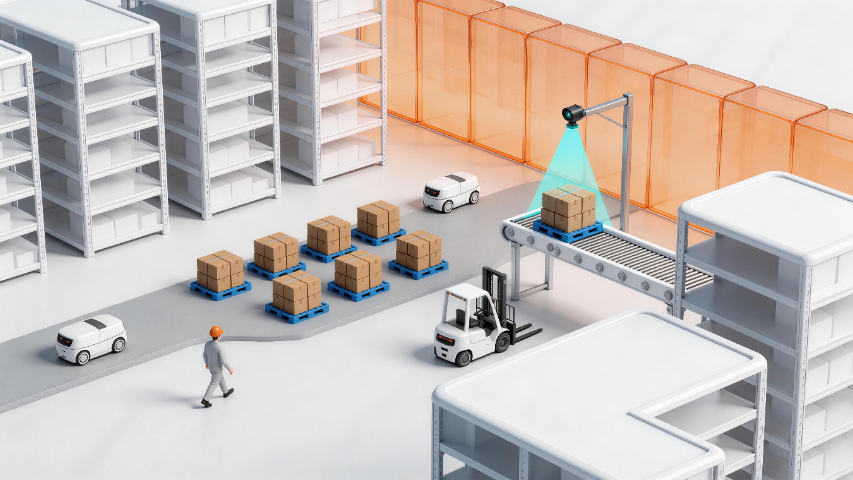
3D视觉体积测量系统组成及应用场景:杭州星火博特3D视觉体积测量解决方案由高性能3D视觉相机、先进体积测量算法和灵活软件平台组成,保障测量精细高效。3D相机内置算力,无需依赖外部CPU即可运行,提升测量速度与精度;3D体积检测软件实时处理三维数据,生成精确长宽高及体积结果并反馈给上层控制系统;即时反馈系统可快速上报检测结果,助力上层自动化决策。该方案广泛应用于物流仓储、制造业等领域,助力企业优化库存、提升效率,减少人工误差与成本。体积测量系统部署注意事项:环境要求:尽管设备具备良好的动态适应性,但在粉尘严重、油污过多或水雾较重的场景中,光学成像可能会受到影响。建议确保测量环境清洁,并保证3D视觉相机的支架具有足够的刚性和稳定性。适用物体类型:该解决方案适用于物流输送线料框、转运托盘和大型货物等复杂形态物体,尤其适合需要高精度体积测量的工业物流仓储场景。 sparkbot团队的3D视觉相机模组助力智能割草机器人适用于家庭庭院、公园、高尔夫球场等室内外草。佛山视觉3D相机扫描
sparkbot团队的3D视觉相机模组助力工业巡检无人机常用于电力线路、石油管道、大型厂区等室外复。苏州双目3D相机避障
医院服务机器人搭载3D激光雷达,实现病区内自主导航与准确服务。其紧凑小巧的设计搭配360°全向感知,可灵活穿梭于病房、走廊、护士站等狭窄空间,准确识别病床、轮椅、医护人员等障碍物。≤1cm的测距精度,确保机器人准确停靠病房门口、护士站,避免碰撞患者及医疗设备。激光雷达结合NDT匹配算法,实现室内高精度定位,解决医院复杂环境下的定位漂移问题,可自主完成药品配送、标本转运、物资补给等任务,减少医护人员工作量,提升医院服务效率,同时保障病区环境的有序与安全。苏州双目3D相机避障
杭州星火博特科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在浙江省等地区的电子元器件行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为行业的中坚力量,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将助力杭州星火博特科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!

该巡检机器人具备多传感融合定位技术,通过多组3D激光雷达SLAM融合,即使在环境发生变化的情况下,仍能保持厘米级定位精度。工业级AI视觉系统支持二维码识别和表计识别,实时传输巡检画面并自动生成数据报表。机器人还具备全天候运行可靠性,IP32以上防护等级确保在复杂工业环境中稳定作业。 3D激光雷达的抗室外强光特性,探测距离可达90米,且在室内昏暗与室外强光环境下性能一致出色,使巡检机器人能够无缝衔接不同光照环境,扩展了应用场景范围。 该巡检机器人在部署效率方面取得明显突破。2000平方米面积的部署时间需40分钟,极大降低了用户的使用门槛。同时,系统支持私有化部署,保护用户数据信息安全,解决了企业...
- 广州3D相机雷达 2026-05-16
- 青岛工业3D相机打印 2026-05-16
- 沈阳叉车3D相机测量 2026-05-16
- 郑州AGV3D相机测量 2026-05-15
- 西安结构光3D相机建图 2026-05-15
- 天津机器3D相机定位 2026-05-15
- 苏州双目3D相机避障 2026-05-15
- 重庆机械狗3D相机定位 2026-05-14
- 武汉结构光3D相机识别 2026-05-14
- 广州托盘3D相机模块 2026-05-14


- 上海视觉3D相机测绘 2026-05-13
- 体积3D相机模组 2026-05-13
- 武汉客流量3D相机厂家 2026-05-13
- 重庆无人机3D相机定位 2026-05-12
- 上海视觉3D相机建图 2026-05-12
- 西安移动机器人3D相机测量 2026-05-12





- 成都无人机3D激光雷达雷达 05-16
- 重庆机器3D激光雷达定位 05-16
- 沈阳客流量3D激光雷达测量 05-16
- 深圳货架TOF相机导航 05-16
- 长沙托盘TOF相机 05-16
- 广州3D相机雷达 05-16
- 深圳体积3D激光雷达扫描 05-16
- 青岛工业3D相机打印 05-16
- 沈阳叉车3D相机测量 05-16
- 苏州机器3D激光雷达测绘 05-16