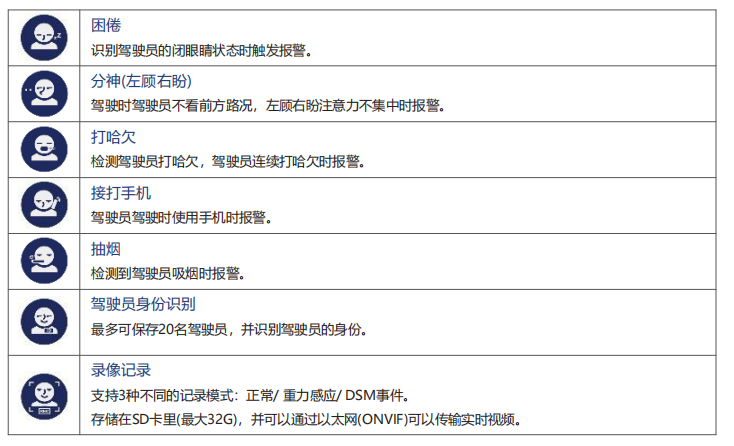
(第3篇)驾驶员状态监测仪的主要功能特征及应用场景
保险风控辅助:
记录驾驶行为数据,为UBI(Usage-BasedInsurance)保险模型提供驾驶风险评级依据。
3.特殊场景适配
夜间驾驶:
红外补光确保暗光环境监测精度,解决传统摄像头夜间失效问题。
强光环境作业:
抗光源干扰设计适用于沙漠、雪地等高反射率区域工程车辆。
三、安装与适配规范
安装位置:需安装在驾驶员正前方无遮挡区域,水平偏移应小于10厘米,垂直距离在65至125厘米之间(比较大为180厘米)。
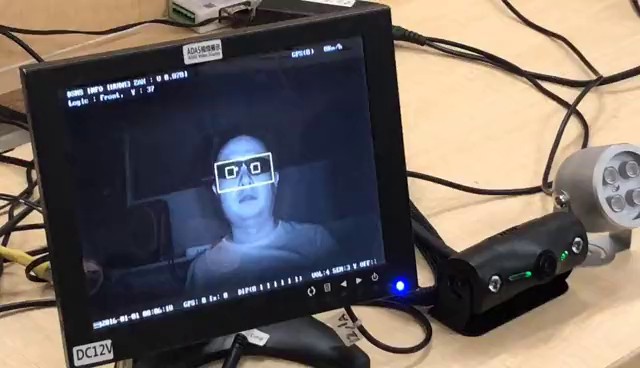
调试流程:首先进行支架固定,接着通过CVBS输出校准进行角度调整,Z后在通电后5秒内完成面部识别,此时绿灯会亮起以确认状态正常。
环境限制:强光源可能对识别产生影响,因此需避免强光直射镜头;若镜头被持续遮挡达到或超过10秒,设备将触发“请勿遮挡”警报。
四、技术参数摘要
图像处理:1/3"CMOS传感器,PAL/NTSC双制式(25~30帧/秒)。
功耗:DC12V,待机≤4W。
结构:尺寸75×118.5×66mm,重量420g(紧凑型设计节省空间)。
报警延迟:行车模式下同类行为10秒内不重复报警,减少干扰。
疲劳驾驶预警系统能将监测到的驾驶员疲劳状态,车辆行驶数据等信息实时传输至MDVR平台,进行分析和管理.贵州司机行为识别司机行为检测预警系统
(第5篇)驾驶员状态监测预警集成到AI360全景影像系统的功能及应用场景
实时查看车辆位置与驾驶状态
回放危险瞬间的图像/视频片段
生成驾驶员行为评分报告,用于绩效考核与培训改进
三、集成系统的综合优越性分析
从多个维度对比,本集成系统相较于传统独L系统具有明显优势:
1,在安全性方面,传统独L系统各系统独L运行,无法协同预警;而本集成系统通过多传感器融合,实现“人因+环境”双重风险预警,能大幅降低事故概率。
2,智能化水平上,传统独L系统功能单一,依赖人工干预;本集成系统由AI深度学习算法驱动,具备自学习与自适应能力,识别准确率高。
3,安装与维护成本方面,传统独L系统需多套设备,布线复杂且故障点多;本集成系统采用统一主机架构,减少ECU数量,简化线路布局,降低了后期维护难度。
4,数据完整性方面,传统独L系统数据分散存储,难以关联分析;本集成系统采用统一加密存储机制,支持多维数据交叉检索,例如可查询何时何地因何原因发生疲劳等情况。
5,合规性保障上,传统独L系统难以满足ZUIX法规要求;本集成系统符合多项国家标准,包括GB/T 39263 - 2020(ADAS术语定义)以及JT/T794 - 2021和JT/T808 - 2021(定位终端技术与通讯协议)。
天津司机行为检测预警系统开发商通过4G/5G网络将视频数据,疲劳检测结果和传感器数据上传至云平台,通过云平台查看实时视频,下载历史数据.

(中篇)自带算法且具备视频同步输出功能的疲劳驾驶预警设备是一种集成了先进技术与智能算法的安全辅助设备,以下是对其的具体阐述:
同时,设备还可以将预警信息发送到后台系统,以便相关人员及时采取措施进行干预。
三、技术原理传感器采集:设备利用摄像头、红外线传感器等硬件设备,实时收集驾驶员的生理数据和周围环境信息。数据预处理:对采集到的数据进行去噪、滤波等预处理操作,以保证数据的可靠和准确。算法分析:通过图像识别、模式识别等算法对处理后的数据进行分析,判断驾驶员是否处于疲劳状态。这包括对驾驶员自身特征的检测(如生理指标、生理反应)以及结合车辆行驶状态的综合判断(如转向频率、刹车频率、行驶速度等)。预警策略:根据分析结果,设备会采取相应的预警策略,如发出声音或视觉信号提醒驾驶员。
(第5篇)远测型驾驶员状态监测仪产品规格书
3.疲劳识别角度边界:当驾驶员低头、眯眼、闭眼持续3秒以上,或头部向左右方向偏头超过45°持续3秒以上时,产品将触发对应预警,明确界定危险驾驶行为的角度阈值。
六、规格参数
远测型驾驶员状态监测仪采用1/3“CMOS940nmIR视频感应器,有效像素对应CVBS700TVL黑白图像,PAL制式下分辨率为720×576,NTSC制式下为720×480。信号标准为视频电压1.0Vp-p,视频输入输出阻抗75Ω,默认采用PAL制式,NTSC制式可在出厂前定制。视频传输速率方面,PAL制为25帧/秒,NTSC制式为30帧/秒,Z低感光度默认Z高级为4500mV/Lux-Sec。
产品配备940nm远红外不可见补光光线,对人眼无伤害;音频预警设置丰富,车行时驾驶员闭眼超过3秒触发“叭”预警声,闭眼状态持续则转为“嘀嗒嘀嗒嘀嗒嘀嗒”;头部侧偏达到3秒触发“咚咚~~”预警声;头部离开监测区域超过3秒触发“啲咑~啲咑”预警声。
指示灯方面,绿色代B正常工作,红色代B危险驾驶行为预警或遮挡机器预警,蓝色代B头部侧偏3秒内、准备预警。电源采用DC 12V,具备停车电池保护功能,最大功率4.0瓦特。 独L算法的疲劳驾驶预警集成系统解决方案相比传统无独L算法产品,在可靠性,响应速度,扩展性具备碾压式优势.

(上篇)自带算法与不带算法的疲劳驾驶预警系统在功能和应用上存在明显的区别。以下是对这两者的详细比较:
一、功能区别自带算法的疲劳驾驶预警系统智能识别与判断:该系统能够运用智能算法,实时分析驾驶员的面部特征、眼部信号以及头部运动等生理状态,从而准确判断驾驶员是否处于疲劳状态。实时预警:一旦检测到驾驶员疲劳程度超标,系统会立即发出警报,提示驾驶者及时停车休息,有效避免潜在的安全风险。数据处理与决策本地化:所有数据处理和决策均在本地设备上完成,不依赖于外部网络,因此具有更高的实时性和稳定性。不带算法的疲劳驾驶预警系统基础监测:这类系统通常只能进行基础的驾驶员状态监测,如通过简单的传感器检测驾驶员的眼部活动或头部位置等,但缺乏智能算法的支持,因此无法进行深入的生理状态分析和疲劳程度判断。预警功能有限:由于缺乏智能算法,这类系统的预警功能可能相对简单,可能只能提供基本的警示信号,而无法提供详细的疲劳程度分析和个性化的预警建议。
二、应用区别应用场景自带算法的系统:更适用于需要长时间连续驾驶的场景,如长途货运、公共交通等,因为这些场景下驾驶员更容易出现疲劳状态。
疲劳驾驶预警分心驾驶的判定通常依赖于对驾驶员视线方向,头部位置及动作等信息的分析.贵州司机行为识别司机行为检测预警系统
自带算法的疲劳驾驶预警系统广泛应用于各类车辆中,特别是长途客车,货车等易发疲劳驾驶的车型.贵州司机行为识别司机行为检测预警系统
(第4篇)远测型驾驶员状态监测仪产品规格书
四、设备完整尺寸说明远测型驾驶员状态监测仪采用紧凑型外观设计,适配各类特殊设备安装空间,具体尺寸信息如下:
1.产品主体尺寸:长75mm、宽118.5mm、高66mm,小巧造型可灵活嵌入驾驶舱内,不会占用过多空间影响驾驶员操作。
2.包装尺寸:外包装盒长120mm、宽160mm、高60mm,兼具防护性与便携性,便于产品运输与存储。
3.重量参数:产品净重量为420克,整体轻量化设计降低安装承重压力;含包装总重量为750克,进一步提升运输便利性。
五、识别监测范围界定远测型驾驶员状态监测仪的监测范围经过精细调校,可覆盖驾驶员正常驾驶时的头部活动区域,具体界定如下:
1.镜头可视与有效监测范围:镜头水平可视角度达120°,但核X有效监测区为中间60°范围;垂直可视角度为60°,核X有效监测区为中间30°范围,确保重点聚焦驾驶员头部区域。
2.距离与位置范围:产品与驾驶员面部的Z大直线监测距离≤180cm,推荐使用距离为65cm~125cm;监测覆盖驾驶员正前方固定位置左右偏移<30cm的区域,适配不同体型驾驶员的头部活动空间。
贵州司机行为识别司机行为检测预警系统