- 品牌
- 星火博特
- 型号
- 通用
末端无人配送的轻量化方案 末端无人配送(如小区、写字楼较为后一公里配送)对设备轻量化、低成本的需求尤为突出。小型化3D激光雷达通过芯片级集成技术,大幅缩小设备体积与重量,适配小型无人配送车的搭载需求。其采用iToF间接飞行时间测距原理,通过发射调制红外光,测量相位差计算目标深度信息,无需复杂算法即可实现准确感知。应用案例中,某社区无人配送车搭载该雷达,依托芯片级集成的轻量化优势,体积小巧不占用配送空间,可灵活穿梭于小区楼栋之间,iToF原理保障准确测距,能准确识别台阶、井盖等障碍物,完成快递、生鲜的上门配送,单辆车日均配送订单达80单,较人工配送效率提升50%。其成本较传统激光雷达降低70%以上,量产良率突破90%,可实现规模化应用,为末端无人配送的普及扫清成本障碍。城市测绘机器人利用该雷达,完成城市建筑三维建模,助力城市数字化建设。济南割草机3D激光雷达扫描
工业园区无人配送的稳定保障 工业园区无人配送场景中,机械噪声、电磁干扰、粉尘等因素,易影响感知设备的稳定性,抗干扰3D激光雷达通过硬件屏蔽与算法优化,实现复杂工业环境下的稳定感知。其硬件采用电磁屏蔽设计,搭载粉尘过滤模块,保证探测稳定性,结合IMU惯性测量单元的数据,有效过滤无效点云。应用案例中,某汽车零部件园区的无人配送车搭载该雷达,依托电磁屏蔽设计抵御车间机械电磁干扰,粉尘过滤模块避免粉尘影响激光收发,结合IMU数据过滤无效点云,在机械加工车间、粉尘车间等场景中稳定完成零部件转运,准确识别园区内大型设备、运输车辆等目标,未出现感知失效情况,保障工业物流的高效运转,日均转运零部件1000余件。济南割草机3D激光雷达扫描建筑机器人搭载该雷达,完成建筑施工现场空间测绘,辅助施工规划与安全监测。

无人配送车在雨雾、强光、夜间等复杂气象条件下的运行安全,依赖抗干扰能力强劲的感知技术。3D激光雷达凭借其强穿透性与全天候工作特性,成为智慧物流感知系统的重要补充,填补了激光雷达在恶劣环境下的感知短板。利用多普勒效应实现目标距离、速度、方位及高度四维信息的同步探测,新增高度维度数据,可有效区分地面凸起与低矮障碍物。应用案例中,某同城配送平台的无人车在梅雨季节搭载该雷达,借助其强穿透性优势,在中雨、强逆光场景下仍能稳定探测,四维数据准确区分路面积水与低矮障碍物,未出现一次避障失误,较传统感知方案故障率降低80%。3D激光雷达优化了近距离探测精度,测距误差≤5cm,与激光雷达形成多传感器融合感知方案,进一步提升无人配送车的环境适应性与运行安全性。
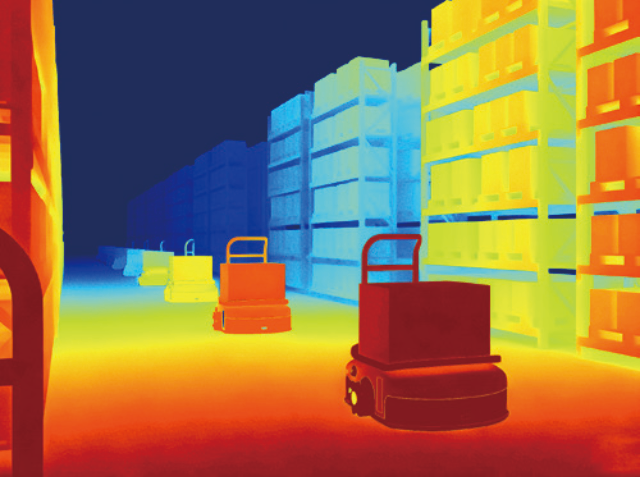
3D激光雷达强化AGV安全性能与稳定运行能力 半球形3D激光雷达凭借多项优势,进一步强化AGV在仓储场景的安全性能与运行稳定性。其超高角分辨率可准确检测小零件、碎片等细小障碍物,让AGV提前调整路线,减少货物损坏与设备故障;10厘米近距离探测能力搭配小巧体积,实现无盲区覆盖,适配货架间距小、近距离作业场景。同时,其抗干扰设计可解决多AGV同时作业时的信号干扰问题,确保各AGV准确感知环境、做出正确决策,大幅降低运行风险,提升仓储物流整体运作效率。校园巡检机器人利用该雷达,完成校园三维建模,排查校园设施安全隐患。

四足机器人感知瓶颈与激光雷达的关键作用 随着机器人技术的迅猛迭代,四足机器人正加速从实验室走向工业巡检、安防巡逻、应急救援等复杂现实场景。在此过程中,极端环境下的准确感知已成为制约行业发展的重要瓶颈——无论是强光、低能见度等恶劣天气,还是狭窄空间、复杂地形等特殊场景,都对机器人的环境感知能力提出了极高要求。 激光雷达凭借主动探测、不受环境光线干扰、高精度获取三维环境信息的重要特性,成为解决这一难题的关键技术路径。其中,半球形3D激光雷达凭借多重技术优势,成为四足机器人领域备受青睐的感知方案。该设备具备360°水平视场与大角度垂直视场的全景观测能力,可无死角覆盖周边环境,解决狭窄空间穿行、上下楼梯等场景的感知盲区;10米测距范围内能实现厘米级精度,输出高密度点云数据,为机器人避障、路径规划提供可靠支撑。测绘机器人利用该雷达,完成山区三维建模,为山区开发与规划提供数据支撑。深圳无人机3D激光雷达雷达
医疗巡检机器人通过该雷达绕障,在医院走廊内穿梭,排查医疗设备运行隐患。济南割草机3D激光雷达扫描
城市街巷无人配送的适配之选 城市街巷场景中,强光、眩光、建筑物阴影等复杂光照条件,易导致传统激光雷达点云失真,影响无人配送车的运行安全。防眩光3D激光雷达通过算法优化与硬件升级,有效解决光照干扰问题,成为城市街巷无人配送的理想感知设备。其采用自适应光强调节技术,可动态调整激光发射功率,搭载点云噪点抑制算法,点云可用性较传统雷达提升30%以上。应用案例中,某城市无人配送车在正午强光、傍晚逆光场景下,搭载该雷达,借助自适应光强调节技术避免眩光干扰,点云噪点抑制算法过滤无效点云,顺利完成街巷配送,准确避让非机动车与行人,无任何安全隐患,完美适配城市复杂路况,推动无人配送车从封闭园区走向开放街巷。济南割草机3D激光雷达扫描
杭州星火博特科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在浙江省等地区的电子元器件中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的服务理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来杭州星火博特科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!

从舞台到生活,3D激光雷达推动机器人落地普及 2026马年春晚,魔法原子机器人三次登台,用高难度表演与精细操作,向全球观众展示了中国智造的实力,而3D激光雷达作为关键支撑技术,正推动机器人从舞台走向日常生活。早期机器人受限于感知技术,难以适配真实生活场景,只能作为“表演工具”。3D激光雷达的应用,彻底改变了这一现状,其混合固态技术实现了无死角感知,10厘米小盲区适配近距离精细操作,3D立体感知能力助力机器人自主适应复杂环境。春晚舞台上,机器人能准确完成捞面、斟酒等动作,正是这项技术的生动体现。随着技术的不断成熟,3D激光雷达正推动机器人向更多场景普及,无论是家庭服务、餐饮行业,还是工业制造领域...
- 沈阳库位3D激光雷达扫描 2026-05-16
- 成都无人机3D激光雷达雷达 2026-05-16
- 重庆机器3D激光雷达定位 2026-05-16
- 沈阳客流量3D激光雷达测量 2026-05-16
- 深圳体积3D激光雷达扫描 2026-05-16
- 苏州机器3D激光雷达测绘 2026-05-16
- 深圳人形机器人3D激光雷达测绘 2026-05-15
- 济南割草机3D激光雷达扫描 2026-05-15
- 苏州AMR3D激光雷达建图 2026-05-15
- 天津AGV3D激光雷达检测 2026-05-15
- 青岛体积3D激光雷达检测 2026-05-14
- 青岛移动机器人3D激光雷达测绘 2026-05-14
- 上海割草机3D激光雷达测量 2026-05-13
- 济南割草机3D激光雷达统计 2026-05-13
- 上海库位3D激光雷达检测 2026-05-13
- 武汉割草机3D激光雷达雷达 2026-05-13




- 成都无人机3D激光雷达雷达 05-16
- 重庆机器3D激光雷达定位 05-16
- 沈阳客流量3D激光雷达测量 05-16
- 深圳货架TOF相机导航 05-16
- 长沙托盘TOF相机 05-16
- 广州3D相机雷达 05-16
- 深圳体积3D激光雷达扫描 05-16
- 青岛工业3D相机打印 05-16
- 沈阳叉车3D相机测量 05-16
- 苏州机器3D激光雷达测绘 05-16