- 品牌
- 瑞必拓/高创
- 型号
- 齐全
- 额定功率
- 1.4kw,1.5kw
- 额定电压
- 110V,220V
- 额定电流
- 18.1A,20.6A
直流无刷电机凭借其高效能特性在工业与民用领域占据明显优势。传统有刷电机通过电刷与换向器实现电流切换,过程中因机械摩擦产生能量损耗,而直流无刷电机采用电子换向技术,完全消除电刷摩擦损耗,能量转换效率可提升15%-20%。这一特性使其在需要长时间运行的设备中表现尤为突出,例如电动工具、家用电器及新能源汽车驱动系统,不仅降低了能源消耗,还明显减少了设备运行时的热量产生,延长了重要部件的使用寿命。此外,其高效率特性与轻量化设计形成协同效应,在相同功率输出下,直流无刷电机的体积和重量较传统电机减少30%以上,为便携式设备与空间受限的场景提供了更优解决方案。新风系统送风电机是无刷直流电机,换气均匀,能耗相对较低。福州直流无刷电机的结构
在工业控制与精密制造领域,120W直流无刷电机通过闭环控制系统的深度集成,实现了对转速、扭矩与位置的精确调控。其内置的霍尔传感器或无传感器算法,可实时反馈转子位置信息,配合PID控制器将转速波动控制在±0.1%以内,满足数控机床进给系统、自动化装配线等场景对运动精度的严苛要求。以3D打印机挤出机构为例,该电机在12V-24V宽电压输入下,可通过PWM调速将挤出速度从5mm/s动态调整至50mm/s,同时保持0.01mm级的层厚控制能力,大幅提升打印质量。在医疗设备领域,其低电磁干扰特性(EMI<30dB)与IP54防护等级,使其成为输液泵、呼吸机等生命支持设备的理想动力源。通过优化磁路设计与热管理方案,该电机在连续负载工况下可将温升控制在65℃以内,确保设备长期运行的稳定性。随着碳化硅功率器件与AI控制算法的融合应用,120W直流无刷电机正朝着更高功率密度(>1.2kW/kg)、更宽调速范围的方向演进,为机器人关节驱动、无人机云台等新兴领域提供重要动力支持。120w直流无刷电机直销车载空气净化器用无刷直流电机,运行安静,适配车辆供电系统。

直流无刷电机凭借其高效能特性在工业领域占据明显优势。相较于传统有刷电机,其采用电子换向技术彻底消除了电刷与换向器间的机械摩擦,不仅降低了能量损耗,更使电机运行效率提升至85%以上。这种设计使电机在持续运转中保持稳定的功率输出,尤其适用于需要长时间运行的生产设备。其结构简化带来的可靠性提升同样明显,由于取消了易磨损的电刷组件,电机故障率大幅下降,维护周期延长至传统电机的2-3倍。在精密制造场景中,无刷电机展现出的低电磁干扰特性尤为关键,电子换向系统产生的脉冲噪声较传统电机降低40%以上,为数控机床、3D打印设备等对振动敏感的装备提供了更稳定的运行环境。此外,其调速性能的突破性提升改变了传统工业设备的控制模式,通过调整驱动器输出频率,电机可在5%-150%额定转速范围内实现无级变速,这种灵活性使生产线能够快速适应不同规格产品的加工需求。
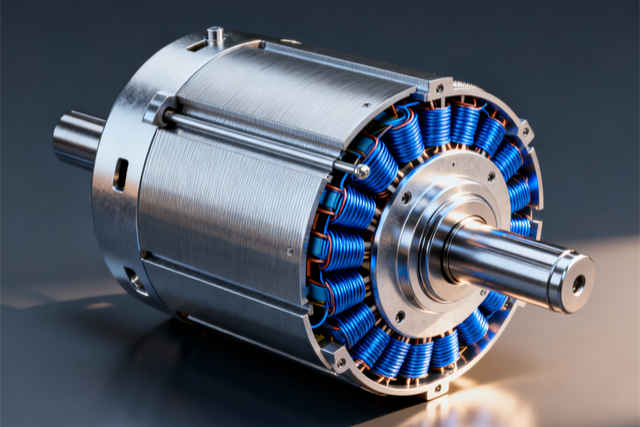
在转子结构上,直流无刷电机进一步细分为内转子与外转子两种类型。内转子设计将永磁体固定于转轴内侧,定子绕组环绕在外,其优势在于散热效率高,适合高转速场景;外转子则将永磁体贴附于外壳内壁,定子位于中心,这种结构转动惯量大,运行平稳,常见于风扇、无人机等需要低速大扭矩的应用。位置传感器作为电子换向的关键,通常采用霍尔元件或编码器。霍尔传感器通过检测转子磁场变化输出方波信号,每60°电角度触发一次,成本低且可靠性高;编码器则通过光电或磁电原理生成更高精度的正交脉冲信号,支持精确速度与位置控制。此外,部分无刷电机采用无传感器技术,通过反电动势过零检测估算转子位置,进一步简化结构并降低成本。这些设计共同赋予了无刷电机高功率密度、宽调速范围和低噪音等特性,使其成为工业自动化、消费电子及新能源领域的重要驱动组件。微型燃气轮机变桨系统采用无刷直流电机,提升发电过程的稳定性。

直流无刷电机的工作原理基于电磁感应与电子换向技术的深度融合,其重要是通过电子控制器替代传统机械换向器实现电流方向的精确切换。电机主体由定子绕组和永磁转子构成,定子绕组通常采用三相对称星形接法,转子则由高磁能积的钕铁硼永磁体组成。当电机启动时,控制器首先通过霍尔传感器或反电动势检测技术获取转子位置信息,随后根据预设的换向逻辑依次启动定子绕组中的不同相。例如,在三相六步换向法中,控制器会按AB-AC-BC-BA-CA-CB的顺序交替导通功率晶体管,使定子磁场以60°电角度的步进方式连续旋转。这种旋转磁场与转子永磁体相互作用,产生持续的电磁转矩推动转子转动。由于电子换向过程无机械摩擦,电机运行时的噪声可降低至40分贝以下,同时效率较传统有刷电机提升15%-20%,特别适用于对静音性要求严苛的医疗设备领域。骨科电钻通过无刷直流电机驱动,提供手术所需的高扭矩输出。武汉大扭矩直流无刷电机
医疗诊断CT机扫描系统依赖无刷直流电机,保障图像采集的稳定性。福州直流无刷电机的结构
位置传感器作为电子换向的关键部件,通过实时监测转子角度实现精确控制。霍尔传感器是常见的低成本方案,其工作原理基于霍尔效应:当转子永磁体旋转至传感器附近时,磁场变化使半导体材料产生电压脉冲,每60°电角度输出一个方波信号,控制器据此判断转子位置区间。对于高精度需求场景,光电编码器或磁电编码器可提供更细致的反馈,例如1024线编码器每转输出1024个脉冲,通过A/B相正交信号可计算转速与转向,甚至通过Z相索引信号实现位置定位。无位置传感器技术则通过检测定子绕组反电动势(Back-EMF)估算转子位置,当电机旋转时,绕组切割磁感线产生的感应电压波形与转子角度直接相关,通过分析三相反电动势的过零点或相位关系,可推断换向时刻,该技术明显降低了电机成本与体积,但低速时检测精度受限。无论采用何种传感器方案,其重要目标均为确保控制器在正确时机切换绕组通电顺序,使定子磁场始终以好的角度牵引转子旋转,实现高效、平稳的能量转换。福州直流无刷电机的结构
- 拉萨直流无刷电机主要厂家 2026-04-04
- 甘肃大扭矩直流无刷电机 2026-04-04
- 昆明高速直流无刷电机生产厂家 2026-04-04
- 福建36v直流无刷电机 2026-04-04
- 新疆直流无刷电机生产厂家 2026-04-03
- 南昌小型直流无刷电机 2026-04-03
- 兰州直流无刷电机多少钱一个 2026-04-03
- 拉萨直流无刷电机内部结构 2026-04-03
- 西宁外转子无刷直流电机 2026-04-03
- 武汉直流无刷电机制造 2026-04-03
- 佛山直流无刷电机的原理 2026-04-03
- 湖北24v直流无刷电机 2026-04-03