取件机器人调试是确保高速顺畅运行的关键步骤。取件机器人的调试过程始于系统复位,去除历史故障代码并恢复出厂参数,为后续校准奠定基础。电机零点校准尤为关键,需通过操作面板手动引导各轴至机械零点标记,确保运动精度基准准确。坐标系配置同样重要,用户坐标系校准基于工件定位孔或基准面,示教坐标点后生成相对位置,便于程序调用。单轴运动调试验证关节性能,在手动慢速模式下逐一控制轴运动,检查顺畅度、限位准确性和抱闸性能。多轴协同调试则验证轨迹精度,通过直线和圆弧运动测试,确保TCP(工具中心点)坐标校准无误。若出现编码器故障或轨迹偏移,需检查线缆或重新校准TCP。调试中强调安全防护,如碰撞检测和过载保护,避免设备损伤。此方法有助于提升取件机器人的稳定性,减少生产中断,帮助用户优化压铸生产效率。采用取件机器人和镶件系统联动技术,压铸件镶件安装不良率降低至0.1%以下,解决传统人工装配的效率瓶颈。镇江自动化取件机器人图片
压铸岛取件机器人故障排除指南有助于快速恢复生产。常见故障包括抓手未夹紧导致工件滑落、通讯中断引发动作停滞以及位置漂移造成抓取不准。排查时应遵循由简到繁原则:先检查气源压力与电气连接是否正常,再核对控制器报警代码与I/O信号状态;若机械臂出现异响或抖动,则需检视减速机润滑与导轨磨损情况。定期保养与备用夹具储备,可将停机时间压缩至较低水平。掌握系统化排除方法,使维护团队在面对突发状况时从容应对,保障取件机器人长期稳定运行,维持产线持续高效产出。湖州高效取件机器人怎么操作苏州东尔汇为行业提供取件机器人、喷雾机器人集成系统和其他数十款压铸自动化设备。

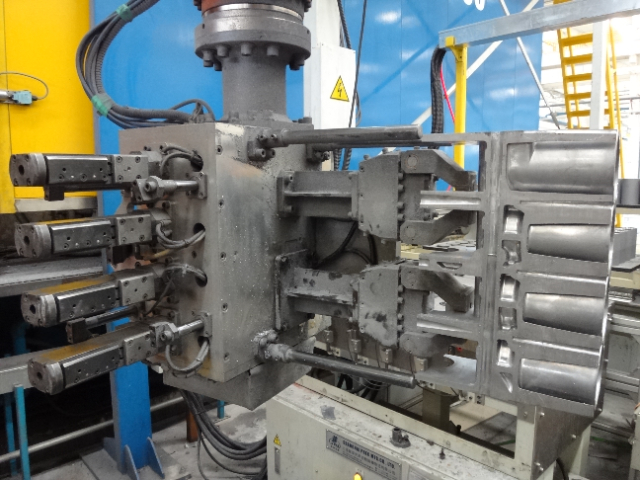
高效取件机器人定制夹手是提升压铸件取件效率的关键部件,其根据压铸产品的形状、重量与材质专属设计,确保夹持的稳定性与适配性。定制夹手采用高刚性耐磨材料,搭配自适应压力调节系统,既能避免对压铸件表面造成损伤,又能在高速取件过程中防止工件脱落。用户使用时,取件机器人通过定制夹手可实现一次多件取放或复杂工件准确的抓取,相较于通用夹手,取件效率提升 30% 以上,同时降低工件报废率,尤其适用于批量生产场景,让每一道取件工序都高效可控。
在压铸产线中,压铸岛取件机器人的调试方法直接决定上线速度与运行稳定性。调试阶段应首先完成坐标校准,通过示教器逐点确认各工位位置,确保抓取与放置动作无偏差。随后进行负载测试,验证夹手与臂展在相对较大工作范围内的运动平稳性,并调整伺服增益以兼顾响应速度与抖动控制。完成空循环运行后,再加载真实工件进行带料试机,及时记录并优化节拍差异。科学的调试流程能让取件机器人在投产首日即达到设计节拍,缩短产线磨合期,助力提升生产效率,并为后续稳定运行奠定坚实基础。集成镶件系统的高速取件机器人可以为客户带来单件加工周期≤5秒的超高自动化装配效率。

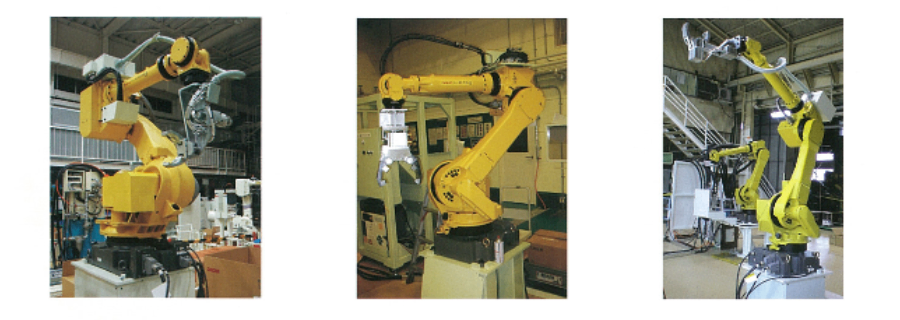
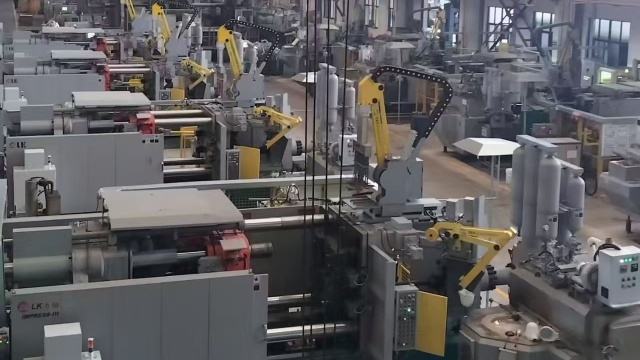
在压铸行业迈向智能制造的进程中,自动化取件机器人已成为提升产线柔性与效率的关键装备。当前市场行情显示,随着人工成本持续上升与产品精度要求提高,越来越多企业开始用取件机器人替代人工完成高温、高风险的取件作业。行业应用价值不仅体现在24小时连续稳定运行,更在于与压铸机、喷雾机、输送系统的准确同步,实现全工序无缝衔接。取件机器人在减少工伤风险、稳定产品质量、降低废品率方面的综合效益,已被普通验证,成为压铸自动化改造的优先选项。采用进口伺服马达和驱动单元,压铸岛取件机器人实现高速准确夹取工件。温州压铸岛取件机器人操作流程
苏州东尔汇新款取件机器人具备碰撞检测和故障自诊断功能,因此具有非常高的安全性。镇江自动化取件机器人图片
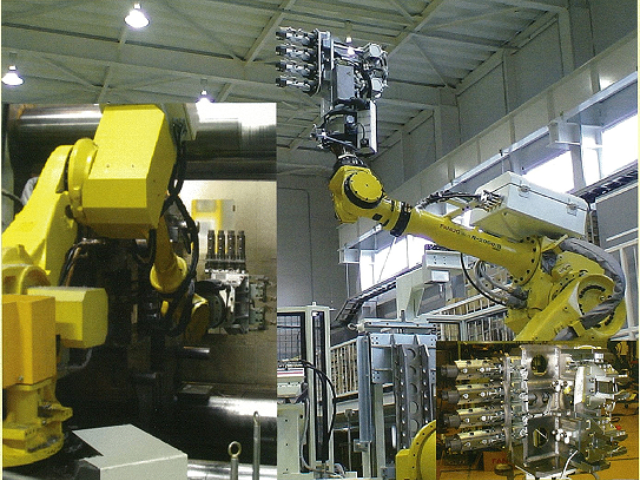
高精度取件机器人解决方案融合了精密机械与智能感知双重优势。通过高分辨率编码器与激光测距传感器,机器人可实时校正抓取位姿,即便模具存在微小偏移也能精细修正。控制系统采用先进的运动插补算法,保证加速与减速阶段的平滑过渡,避免因惯性冲击导致的工件位移或掉落。配合视觉定位模块,取件机器人能在毫秒级内识别铸件姿态并完成路径规划。该方案将抓取误差控制在±0.1mm以内,大幅提升良品率与工序衔接效率,为高节拍压铸生产提供坚实技术支撑。镇江自动化取件机器人图片
苏州东尔汇机电有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在江苏省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同苏州东尔汇机电供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!