气缸在机器人末端执行器中的应用机器人末端执行器(如抓手)多采用气缸作为驱动元件,凭借快速响应和大推力实现工件的抓取与释放。平***爪通过两个活塞的同步运动实现夹取动作,适合抓取规则形状工件;摆动气爪则通过两个手指的相对摆动完成抓取,适应不规则物体。在物流分拣机器人中,气缸驱动的抓手可在 0.2 秒内完成一次开合动作,分拣效率达每小时 800 件以上。为保护易碎工件,部分抓手配备力传感器,通过调节气缸压力实现柔性抓取。节能高效是薄型气缸的显效优势之一。江苏气缸型号规格表
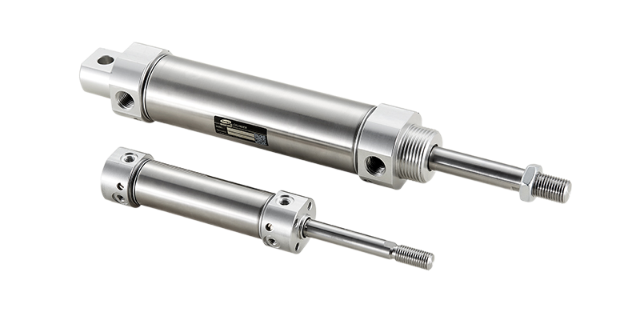
特殊功能气缸气液阻尼缸:气压驱动 + 液压阻尼调速,运动平稳(无冲击),速度可调(0.5~500mm/s),适合精密送料、压力装配(如轴承压装)。冲击气缸:通过瞬间释放高压气体产生高速冲击(速度可达 10m/s 以上),冲击力大,用于冲压、打孔、破碎(如小型金属件冲孔)。夹紧气缸:活塞杆端部带夹紧爪(如杠杆式、肘节式),快速夹紧工件,自锁性好(断电 / 断气不松夹),用于机床夹具、焊接定位。真空气缸:活塞杆端部集成真空吸盘,兼顾气动驱动与真空吸附,用于轻薄物料(如纸张、薄膜)的搬运。三、按安装方式分类固定式:通过法兰(前端 / 后端法兰)、脚座(轴向 / 径向脚座)固定在设备上,适合负载方向与活塞杆轴线一致的场景(如水平推料)。摆动式:通过耳环(单耳环 / 双耳环)、轴销安装,允许气缸随负载轻微摆动(±5°),抵消安装偏差,适合倾斜推料、翻转机构。嵌入式:缸体嵌入设备凹槽内,节省空间,用于小型自动化设备(如电子元件装配机)。替代气缸生产厂家避免对活塞杆产生侧向力。
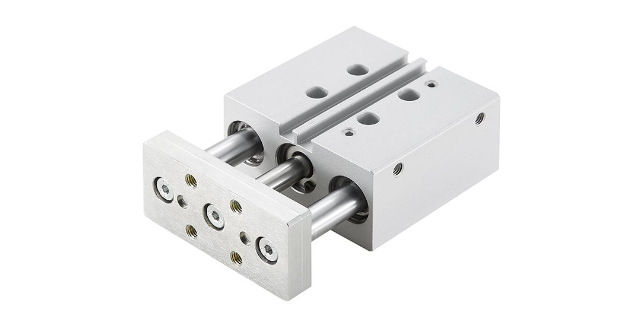
气缸的安装空间优化与紧凑型设计在空间受限的设备中,紧凑型气缸通过优化结构布局实现小体积与高性能的平衡。薄型气缸将缸筒长度压缩至传统型号的 60%,适合安装在模具内部或狭小机械间隙中;转角气缸采用 90° 弯曲的活塞杆设计,可在垂直空间内实现水平方向的推力输出。在半导体晶圆搬运设备中,紧凑型气缸的小尺寸设计避免了与其他部件的干涉;在手表装配线上,其轻量化特性减少了机械臂的负载,提升了运动速度。紧凑设计并非简单缩小尺寸,而是通过有限元分析优化结构强度,确保在小体积下仍能满足负载要求。
制造业自动化机床上下料在CNC加工中心,Φ63mm气缸驱动机械臂夹持工件,行程500mm,动作节拍6s/次。通过磁性开关定位,配合真空吸盘实现金属毛坯精细上料,耐铁屑设计延长使用寿命。注塑机顶出机构Φ100mm双作用气缸安装于模板后方,顶出力4000N(0.6MPa),行程150mm。开模后0.5s内顶出塑料制品,缓冲结构降低冲击噪音,适应高温油污环境。冲压机械手传送三组Φ50mm气缸组成XYZ直角坐标系统,水平移送速度1.2m/s,重复定位±0.3mm。配合气动夹爪完成钣金件工序间转移,日工作20万次无故障。气缸的控制方式简单,易于实现自动化控制。
气缸与 PLC 的控制逻辑设计气缸的自动化控制通常通过 PLC 编程实现,基本控制逻辑包括单缸往复、多缸联动等。单缸往复控制通过电磁阀的通断切换实现气缸的伸出与缩回,配合限位开关实现自动循环;多缸联动则需要设计时序逻辑,确保各气缸动作协调,如装配线上的 “抓取 - 移动 - 放置” 流程。在复杂工况下,可采用步进控制方式,将整个运动过程分解为若干步序,每步序完成后反馈信号至 PLC,再执行下一步动作。控制程序设计时需包含故障诊断模块,当气缸动作超时或传感器异常时,能及时触发报警并停止运行。它在医疗设备、电子仪器等领域发挥着重要作用。安徽气缸英文
具有良好的过载保护能力,避免因过载而损坏。江苏气缸型号规格表
. 革新空间设计理念薄型气缸(Slim Cylinder)通过突破性结构优化,将安装高度压缩至传统气缸的50%以下。其**采用**度铝合金缸筒与精密活塞杆一体化设计,在保证输出力的同时***减少轴向空间占用。特别适用于机器人关节、电子组装线等紧凑型设备,为自动化系统节省超过30%的布局空间。**导向结构有效抑制侧向力,确保高精度直线运动。2. 轻量化性能**航空级铝合金材质使缸体重量降低40%,搭配碳钢活塞杆实现强度与轻量化的完美平衡。紧凑型密封组件采用低摩擦系数材料,驱动压力可低至0.1MPa仍保持稳定运行。这种轻量化设计大幅降低设备惯性负载,提升高速往复运动响应速度,特别适合每分钟300次以上的高频作业场景。江苏气缸型号规格表