气动元件中的无杆气缸应用很广无杆气缸的结构特点与应用场景无杆气缸通过活塞与滑块的磁耦合或机械连接实现直线运动,取消了传统活塞杆,因此具有结构紧凑、行程长的优势。磁耦合无杆气缸利用强磁力传递动力,运动平稳但负载能力有限;机械接触式无杆气缸则通过导轨滑块传递力,负载更大但存在一定摩擦损耗。在自动化焊接流水线中,无杆气缸可带动焊枪完成长距离连续作业;在包装机械的薄膜牵引机构中,其无突出部件的设计能有效避免物料缠绕。采用优越材料制造,保证了气缸的强度和耐磨性。FESTO气缸注意事项
气缸在机器人末端执行器中的应用机器人末端执行器(如抓手)多采用气缸作为驱动元件,凭借快速响应和大推力实现工件的抓取与释放。平***爪通过两个活塞的同步运动实现夹取动作,适合抓取规则形状工件;摆动气爪则通过两个手指的相对摆动完成抓取,适应不规则物体。在物流分拣机器人中,气缸驱动的抓手可在 0.2 秒内完成一次开合动作,分拣效率达每小时 800 件以上。为保护易碎工件,部分抓手配备力传感器,通过调节气缸压力实现柔性抓取。上海双作用气缸自动化生产线中,气缸实现精确定位与抓取。

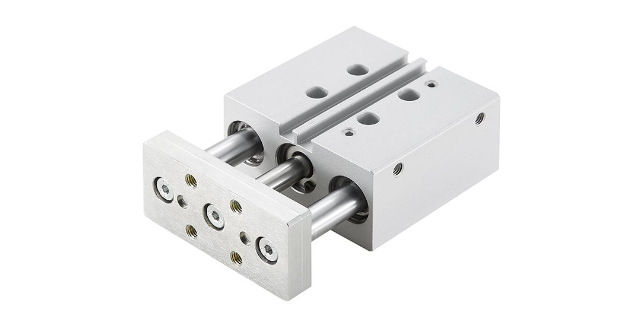
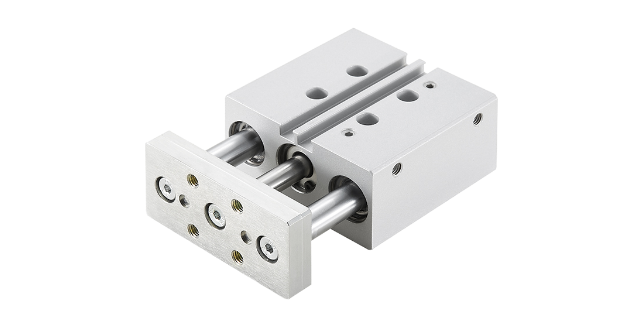
. 革新空间设计理念薄型气缸(Slim Cylinder)通过突破性结构优化,将安装高度压缩至传统气缸的50%以下。其**采用**度铝合金缸筒与精密活塞杆一体化设计,在保证输出力的同时***减少轴向空间占用。特别适用于机器人关节、电子组装线等紧凑型设备,为自动化系统节省超过30%的布局空间。**导向结构有效抑制侧向力,确保高精度直线运动。2. 轻量化性能**航空级铝合金材质使缸体重量降低40%,搭配碳钢活塞杆实现强度与轻量化的完美平衡。紧凑型密封组件采用低摩擦系数材料,驱动压力可低至0.1MPa仍保持稳定运行。这种轻量化设计大幅降低设备惯性负载,提升高速往复运动响应速度,特别适合每分钟300次以上的高频作业场景。
摆动气缸(输出旋转运动)将气压能转化为小于360°的旋转运动,分齿轮齿条式和叶片式:齿轮齿条式摆动气缸:活塞带动齿条,齿条驱动齿轮旋转(输出轴转动),角度可定制(如90°、180°、270°),输出扭矩大,精度高(角度误差≤±0.5°)。应用:自动化设备的翻转(如工件翻转90°)、阀门启闭(球阀、蝶阀)。叶片式摆动气缸:缸内叶片在气压推动下旋转,结构紧凑但扭矩较小,适合轻载旋转(如小型物料翻转)。摆动气缸(输出旋转运动)将气压能转化为小于360°的旋转运动,分齿轮齿条式和叶片式:齿轮齿条式摆动气缸:活塞带动齿条,齿条驱动齿轮旋转(输出轴转动),角度可定制(如90°、180°、270°),输出扭矩大,精度高(角度误差≤±0.5°)。应用:自动化设备的翻转(如工件翻转90°)、阀门启闭(球阀、蝶阀)。叶片式摆动气缸:缸内叶片在气压推动下旋转,结构紧凑但扭矩较小,适合轻载旋转(如小型物料翻转)。薄型气缸的精度控制十分精确,动作稳定可靠。

气缸的动态特性与冲击抑制气缸的动态特性包括启动时间、加速性能和冲击响应,这些参数直接影响设备的运行效率和稳定性。当气缸突然启动时,由于气体的可压缩性,会产生一定的压力波动,导致活塞杆的瞬时冲击。通过采用预压控制或阶梯式压力调节,可有效降低启动冲击;在高速运动的气缸前端安装气液阻尼缸,能将运动末端的冲击能量转化为液压能,实现平稳减速。在精密检测设备中,通过仿真软件优化气缸的动态参数,可将冲击振动控制在 0.1g 以下,确保检测精度不受影响。具有良好的自锁性能,在特定条件下保持位置不变。哪里有气缸定义
易于维护和修理,降低了维护成本和停机时间。FESTO气缸注意事项
结构设计超薄机身轴向高度≤25mm(Φ16缸),比标准气缸节省30%空间。模块化装配C形扣环/铆合固定结构,支持直接安装无需支架。双杆防偏载Φ32缸抗侧向力达2000N,消除活塞杆弯曲风险。磁性开关多向安装通孔及螺纹孔共用设计,8个方向可调感应位。紧凑脚座选项LB/LC型安装件降低整体高度,适配狭小设备空间。性能参数宽压工作双作用型0.05-1MPa,单作用型0.13-1MPa稳定运行。高速响应比较高运动速度2m/s(无杆型),满足高频动作需求。强缓冲能力聚氨酯缓冲垫吸收90%冲击能,终端降噪25dB(A)。耐温密封氟橡胶(FKM)密封件耐受-40℃~150℃极端环境。双倍寿命硬铬活塞杆+PTFE涂层,寿命提升至500万次。微力控制低摩擦结构启动压力*0.03MPa(LA节能型)。FESTO气缸注意事项