- 品牌
- 慧联
- 型号
- 种类齐全,接收定制
矿山地下作业面临信号屏蔽、粉尘多、振动强等复杂环境,无锡慧联惯性导航凭借 “无信号自主定位” 技术,成为矿山人员与设备导航的可靠选择。其原理是通过 IMU 传感器自主推算位置,结合井下预设坐标节点校准,定位误差≤0.5 米,解决了传统 GPS 在井下完全失效的问题。山西大同某煤矿引入该系统后,为 200 名井下作业人员配备了轻量化惯导定位终端,同时为 30 台掘进机、运输车提供导航支持,人员定位响应时间≤2 秒,设备调度效率提升 40%,井下事故发生率下降 60%。产品采用本质安全型设计,通过煤安认证,抗粉尘、抗振动性能达工业级标准,终端重量 180g,不影响人员作业。采购时提供井下场景定制化方案,包括基站部署、数据管理平台搭建,配套三年质保与每月一次的井下维护服务,彻底解决矿山地下 “定位难、调度乱” 的行业痛点。单兵作战设备轻量化适配,140g 小巧机身,慧联惯导兼顾性能与便携。石家庄双轴惯性导航探头
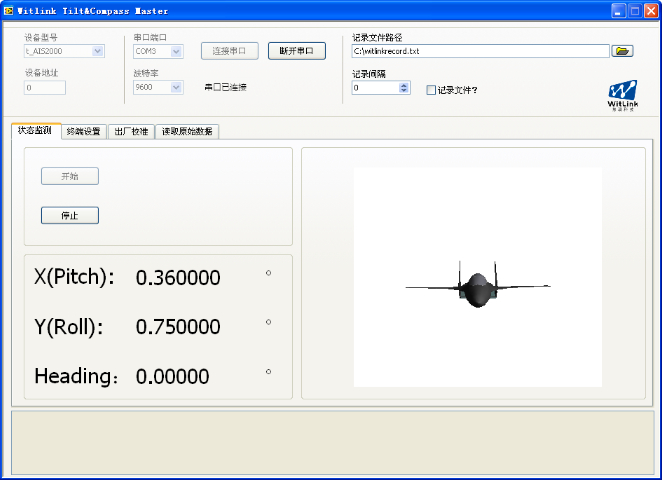
无锡慧联惯性导航为航海船舶打造了抗摇晃、抗盐雾的方案,技术基于光纤陀螺的 “萨格纳克效应”,结合电子罗盘与气压计辅助校正,可在无卫星信号的远洋、海峡区域稳定输出航向角与姿态数据,误差≤0.1°。传统船舶导航易受海浪颠簸、电磁干扰影响,而慧联惯导通过 3000g 抗冲击设计与防盐雾腐蚀封装,适配海洋高湿度、强腐蚀环境。舟山某远洋渔业公司的 12 艘捕捞船安装该系统后,在南海复杂海况下实现准确航线保持,捕捞范围定位误差从 15 米缩减至 3 米,渔获量提升 18%,同时降低了船舶碰撞风险。产品支持 NMEA0183、RS232 等航海标准接口,可直接对接船舶导航系统,采购时提供海事认证资质文件,五年质保涵盖部件更换,原厂技术团队提供港口现场调试与船员操作培训,让航海导航更可靠、使用更安心。石家庄双轴惯性导航探头自主研发测试软件,3D 仿真动态跟踪,慧联惯导使用调试更便捷。
桥梁隧道的长期形变监测对导航设备的稳定性与精度要求极高,无锡慧联惯性导航采用 “静态姿态测量 + 动态数据补偿” 技术,通过加速度计捕捉微小形变位移,陀螺仪监测结构倾斜角度,配合温度补偿算法,实现 0.001° 级别的测量精度。传统监测方案依赖人工巡检,效率低、风险高,而慧联惯导可长期无人值守运行,数据实时上传至云端平台。港珠澳大桥海底隧道段采用该系统后,成功实现对隧道沉降、侧移的 24 小时监测,形变数据采集频率达 100Hz,异常预警响应时间≤3 秒,累计运行 3 年无数据中断,为隧道安全运维提供了准确数据支撑。产品采用 IP67 密封设计,适配桥梁高空、隧道阴暗潮湿环境,支持 4G/5G 远程传输。采购时提供定制化安装支架与数据对接方案,搭配终身数据解析服务与每年两次校准维护,彻底解决基建监测中 “数据滞后、人工成本高” 的痛点。
自动泊车在地下车库等无信号场景中,面临定位不准、路径规划困难的问题,无锡慧联惯性导航采用 “惯导 + 超声波雷达融合” 方案,是通过 IMU 传感器自主推算车辆位置,配合超声波雷达检测周围环境,实现 8 厘米内的泊车定位误差,解决了传统自动泊车 “依赖卫星信号、地下车库失效” 的问题。某新能源车企采用该方案后,其车型的自动泊车成功率从原来的 70% 提升至 95%,在地下车库的泊车时间缩短至 60 秒以内,用户满意度明显提升。产品支持与车载摄像头、雷达系统无缝对接,适配不同车型的泊车需求,算法可根据车库布局自动调整泊车策略。采购时提供车载场景适配测试,技术团队协助客户进行整车集成与调试,配套五年质保与算法升级服务,彻底解决自动泊车 “地下车库失效” 的行业痛点。电子罗盘 + 气压计辅助,多传感器校正,慧联惯导测量精度再升级。

随着 AI 技术的发展,智能体(如自主机器人、无人车)需要更准确的时空信息支持决策,无锡慧联惯性导航将惯性导航数据与 AI 算法深度融合,是通过惯导提供实时的位置、姿态数据,作为 AI 算法的输入特征,提升智能体的环境感知与决策效率。该技术解决了 AI 算法 “时空信息缺失、决策滞后” 的问题。杭州某 AI 机器人公司采用该方案后,其自主配送机器人的避障响应速度提升 40%,路径规划合理性提升 50%,在复杂路况下的配送成功率达 98%。产品支持与主流 AI 框架兼容,提供数据接口与融合算法示例代码。采购时提供 AI 数据融合技术指导,技术团队协助客户进行算法优化,配套算法升级服务,让惯性导航 “赋能 AI,让智能体更聪明”。惯性 + AI 数据融合,为智能体提供时空信息,慧联惯导赋能 AI 应用。天津模拟量惯性导航
港口集装箱运输定位,厘米级路径规划,慧联惯导提升物流周转效率。石家庄双轴惯性导航探头
水下机器人在深海勘测、海洋工程中面临高压、无光、无信号的复杂环境,无锡慧联惯性导航采用 “耐压密封 + 自主定位” 技术,是通过抗压型 IMU 传感器捕捉机器人姿态与位移,结合深度传感器辅助校准,定位误差≤1 米,耐压等级达 1000 米。传统水下导航依赖声学定位,范围有限、精度低,而慧联惯导可实现长距离自主导航。中科院深海所采用该系统后,其 “深海勇士” 号水下机器人在南海 4500 米深度完成了海底热液区勘测,导航持续稳定,数据采集准确率达 98%,成功发现 3 处新的热液喷口。产品采用钛合金密封外壳,抗海水腐蚀,支持 RS485 水下通信接口。采购时提供水下压力测试报告与定制化耐压方案,配套五年质保与每年一次的深海校准服务,彻底解决水下机器人 “定位不准、耐压不足” 的行业痛点。石家庄双轴惯性导航探头
无锡慧联信息科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在江苏省等地区的仪器仪表行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**无锡慧联信息科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!
无人工厂中,室内机器人需要在复杂的车间环境中实现准确避障与自主移动,无锡慧联惯性导航采用 “惯性导航 + SLAM 融合” 技术,是通过 IMU 传感器提供实时姿态与位置信息,配合 SLAM 算法构建室内环境地图,实现动态避障与路径规划,定位精度达 ±3 毫米。该技术解决了传统室内机器人 “依赖固定标志物、避障灵活性差” 的问题。深圳某电子厂采用该方案后,其 50 台室内搬运机器人在复杂的生产车间内自主运行,避障响应时间≤0.3 秒,无碰撞事故发生,物料搬运效率提升 40%,车间人工成本降低 50%。产品支持室内环境自适应,无需预先构建地图,可实时更新环境信息,适配车间设备布局调整。采购时提供...
- 石家庄双轴惯性导航探头 2026-01-28
- 石家庄惯性导航 2026-01-28
- 蚌埠抗振惯性导航连接线 2026-01-28
- 温州防爆式惯性导航定制 2026-01-28
- 株洲无人机惯性导航连接线 2026-01-28
- 南京微型倾角惯性导航厂家 2026-01-27
- 太原无人机惯性导航定制 2026-01-27
- 广州宽电压惯性导航厂家 2026-01-27
- 哈尔滨轨道交通惯性导航定制 2026-01-27
- 湖南双轴惯性导航连接线 2026-01-27



- 湖北电压惯性导航定制 2026-01-26
- 辽宁电压惯性导航采集系统 2026-01-26
- 蚌埠电流惯性导航校准仪 2026-01-26
- 北京微型倾角惯性导航探头 2026-01-26
- 成都三轴惯性导航探头 2026-01-26
- 吉林宽电压惯性导航校准仪 2026-01-25



- 石家庄惯性导航 01-28
- 蚌埠抗振惯性导航连接线 01-28
- 珠海宽电压电子罗盘模块 01-28
- 重庆无线倾角倾角传感器连接线 01-28
- 温州防爆式惯性导航定制 01-28
- 襄阳防水电子罗盘厂家 01-28
- 株洲无人机惯性导航连接线 01-28
- 洛阳模拟量电子罗盘探头 01-28
- 广东数字加速度传感器探头 01-28
- 徐州数字式倾角传感器批发 01-28