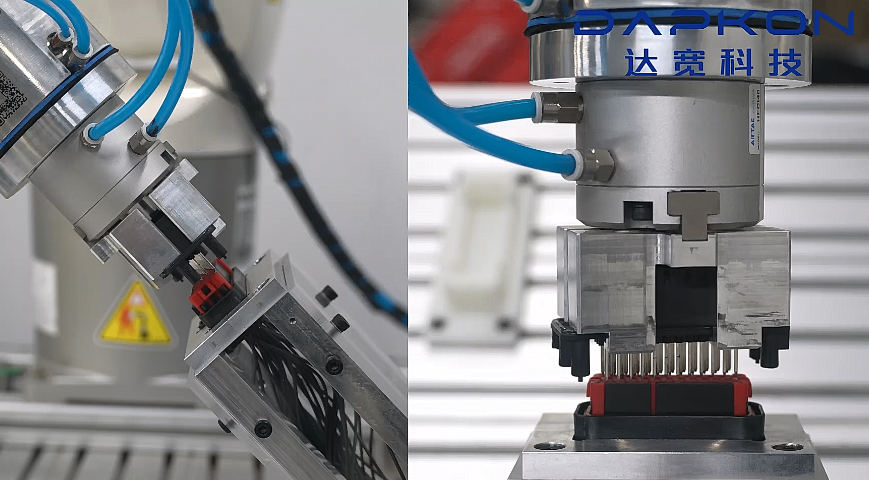
达宽科技的机器人力控是服务器装配领域的一项创新技术。在内存条插拔环节,六维力传感器实时监测插槽阻力,当检测到针脚对准偏差时,系统自动微调角度与推力,确保一次对准。操作者只需预设力值范围,机器人力控便生成适配的插拔曲线,节省调试时间。这一方案让装配过程更加平稳,减少因误操作导致的针脚弯曲风险,提升...
机器人力控基本参数
- 品牌
- 达宽科技,简控机器人,新蓝机器人
- 服务内容
- 软件开发,软件定制,技术开发
- 版本类型
- 普通版,增强版,标准版,测试版,单用户版
- 适用范围
- 企业用户
机器人力控企业商机
机器人力控提升电机装配安全防护等级
装配过程的安全防护对精密电机组件至关重要。机器人力控技术为此建立了主动保障体系。系统持续监测装配过程中的三维力矢量变化,当检测到异常阻力(如部件干涉、错位或卡滞),机器人力控系统会立即触发安全响应,限制输出力矩或启动缓退程序。达宽科技的机器人力控方案配置多重防护策略。实践证明,这种基于实时力感知的安全机制,减少了贵重电磁组件损伤和设备意外停机的风险,营造了更可控的自动化作业环境。 用户利用达宽科技的机器人力控,可实现连续稳定作业,包括夜间或特殊环境。四川工业机器人力控

达宽科技为齿轮装配场景提供端到端的机器人力控解决方案。其技术在于将高精度力传感器、动态控制算法与工艺深度整合,形成自适应装配系统。在实际应用中,该方案可无缝接入主流工业机器人平台,通过开放式接口与MES系统交互生产数据。在减速器制造领域,达宽科技机器人力控系统实时记录每个齿轮的压装曲线并自动生成质量报告。这种深度集成不仅优化了装配工艺,更为制程追溯提供数据支撑。达宽科技专业团队提供全周期技术支持,确保机器人力控系统持续创造价值。海南工业机器人力控调试机器人力控记录每次擦窗轨迹,帮助企业持续优化清洁方案。

在表面处理领域,复杂工件的打磨、抛光等工序长期依赖人工操作,不仅面临操作强度大、环境适应性有限等问题,还难以应对多样化的工艺需求。机器人力控技术的出现,为这些痛点提供了全新的解决思路。机器人力控通过实时感知接触力的变化,让机器人在作业过程中像人手一样灵活调整动作,轻松适配不同材质、不同形状的工件表面。达宽科技深耕机器人力控领域,凭借对表面处理工艺的深刻理解,将机器人力控技术与实际生产场景深度融合,帮助企业突破传统作业模式的限制,让机器人在表面处理任务中发挥更大价值。
在现代制造业中,电机齿轮的装配精度直接关系到电机的运行效率与寿命。达宽科技的机器人力控系统为这一关键环节带来了性的变革。机器人力控通过高精度的六维力传感器,实时监测装配过程中齿轮与轴之间的微小受力变化。当机械臂将齿轮缓缓套入电机轴时,力控系统能够敏锐地感知力变化,并调整机械臂的姿态和力度。这种基于物理反馈的装配方式,彻底改变了传统依赖固定程序和示教点的机器人作业模式。操作人员只需在系统中设定合理的力矩范围和位移参数,机器人便能像经验丰富的技师一样,灵活应对齿轮个体差异带来的装配挑战。相比传统装配方案,力控系统大幅减少了因力度不当导致的齿轮磕碰和轴的磨损,每一次啮合都恰到好处,从而提升了装配成功率,让电机齿轮的装配过程更加流畅、高效,为制造业带来全新的智能化装配体验。达宽机器人力控让双臂机器人插拔线束更智能,像人手一样感知微力变化,动作自然流畅。
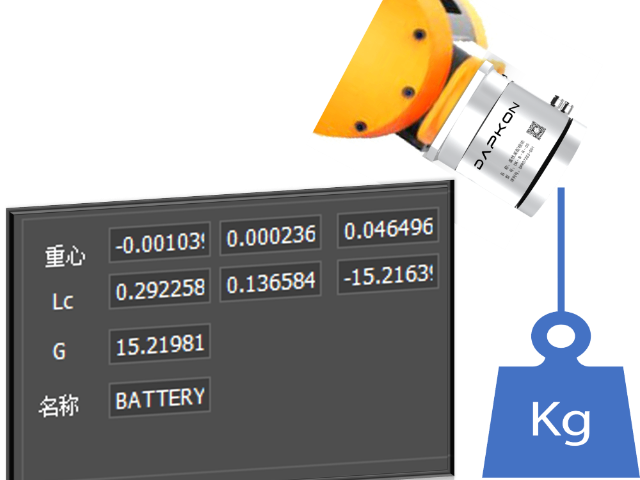
产品一致性是电机装配的要求,机器人力控在此发挥关键作用。传统装配中,机器人缺乏力觉反馈,易出现轴承压装过紧导致转动阻力增大,或过松造成运行晃动的问题,影响电机性能稳定性。达宽科技的机器人力控系统通过预设合理的力值区间,实时监测装配过程中的力觉变化。在轴承压装阶段,系统控制机器人输出均匀力度,确保压装深度与紧密度一致。这种稳定的力控能力让每台电机的装配质量保持均衡,降低因个体差异导致的后续检测返工情况。机器人力控确保每次擦拭力度一致,提高产品处理后的外观与质量统一性。河北协作机器人力控打磨
安全性是达宽机器人力控的优势,遇阻即停,保障人机协作环境安全可靠。四川工业机器人力控
电机齿轮装配对位置精度和配合力有着严格要求。机器人力控技术为解决这一难题提供了有效途径。在齿轮轴孔配合环节,机器人力控系统能够实时感知接触状态,通过柔顺控制自动调整机械臂的位姿和出力。达宽科技开发的机器人力控方案,采用高灵敏度力觉传感与动态响应算法,确保齿轮齿槽与轴齿在接触瞬间实现自适应引导。操作人员设定好目标接触力范围后,机器人力控系统即可自主完成精细的导入过程,有效避免传统硬性装配可能产生的齿面压痕或配合偏差。这种基于力觉反馈的智能装配方式,提升了微小间隙配合的成功率,为用户带来了更顺畅的装配体验。四川工业机器人力控
与机器人力控相关的文章

广西工业机器人力控精密装配
- 山东工业机器人力控厂家 2025-12-30
- 四川工业机器人力控 2025-12-30
- 西藏工业机器人力控装配 2025-12-30
- 福建工业机器人力控方案 2025-12-30
- 辽宁协作机器人力控优势 2025-12-29
- 天津协作机器人力控使用方法 2025-12-29
- 江苏机器人力控打磨 2025-12-29
- 福建机器人力控推荐 2025-12-29
- 四川协作机器人力控方案 2025-12-29
- 江苏机器人力控测试 2025-12-28
- 吉林机器人力控搬运 2025-12-28
- 江西协作机器人力控测试 2025-12-27
与机器人力控相关的产品
与机器人力控相关的新闻
-
福建机器人力控供应商 2025-12-19 10:04:27产品一致性是行星齿轮装配的要求,达宽机器人力控在此发挥关键作用。传统装配中,机器人缺乏力觉反馈,易出现齿轮啮合过紧导致运转异响,或过松影响传动精度的问题。达宽科技的机器人力控系统通过预设合理的力值区间,实时监测装配过程中的力觉变化。当齿轮开始啮合时,系统控制机器人输出稳定力度,确保齿面均匀接触,避免...
-
新疆机器人力控精密装配 2025-12-19 21:05:43引入达宽科技的机器人力控方案进行行星齿轮装配,为制造企业带来多维度价值提升。机器人力控让机器人在精密装配中具备更高的适应性和稳定性,既能应对小批量多品种的柔性生产需求,又能保障大批量生产的质量均衡。通过减少调试时间提升生产效率,通过稳定质量控制降低成本损耗,通过安全机制减少意外损失。这种全流程的优化...
-
吉林机器人力控推广 2025-12-18 11:04:35引入达宽科技的机器人力控方案进行电机装配,为制造企业带来多维度价值提升。机器人力控让机器人在精密装配中具备更高的适应性和稳定性,既能应对小批量多品种的柔性生产需求,又能保障大批量生产的质量均衡。通过减少调试时间提升生产效率,通过稳定质量控制降低成本损耗,通过安全机制减少意外损失。这种全流程的优化能力...
-
天津机器人力控软件 2025-12-18 16:04:37随着制造业智能化发展,力控系统在线束装配中的应用场景不断拓展。无论是汽车线束的复杂对接、家电内部线束的规整排布,还是电子设备中线束的精细连接,力控系统都能凭借其灵活性适配多样化需求。达宽科技持续聚焦力控技术的场景化应用,根据不同行业线束装配的特点,提供定制化的力控系统解决方案,帮助企业实现机器人在更...
与机器人力控相关的问题
新闻资讯
产品推荐
-

浙江高精度力控系统使用方法
2025-12-29 -

机器人柔性力控系统优点
2025-12-29 -

辽宁协作机器人力控优势
2025-12-29 -

简控力控系统方案
2025-12-29 -

天津协作机器人力控使用方法
2025-12-29 -
北京工业力控系统使用方法
2025-12-29 -
江苏机器人力控打磨
2025-12-29 -
中国台湾装配力控系统使用方法
2025-12-29 -

上海达宽科技力控系统设计
2025-12-29