
相关滤波的跟踪算法始于2012年P.Martins提出的CSK方法,作者提出了一种基于循环矩阵的核跟踪方法,并且从数学上完美解决了密集采样(Dense Sampling)的问题,利用傅立叶变换快速实现了检测的过程。在训练分类器时,一般认为离目标位置较近的是正样本,而离目标较远的认为是负样本。回顾前面...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
我国西部地区地形复杂、天气多变,许多电网架设在高山流水之间,给电网的巡检维护造成了不小的困难。于是,不同于传统人工巡检的智能化巡检维护开始逐步应用。这种方式采用无人机加智能化机器人,其中无人机承担巡检工作,而智能化机器人进行维护,两者互相配合。无人机搭载智能化吊舱,吊舱内置图像识别传感器,工程师可以通过远程识别、抵近观察等方式,找出问题所在。无人机机动性灵活性十足,能够便捷去到许多人工难以到达的区域,巡检无死角。无人机巡检一次能够抵得上三个人工同时作业,效率成倍提升。Viztra-LE034图像处理板识别概率超过85%。宁夏目标跟踪销售厂家
目标跟踪
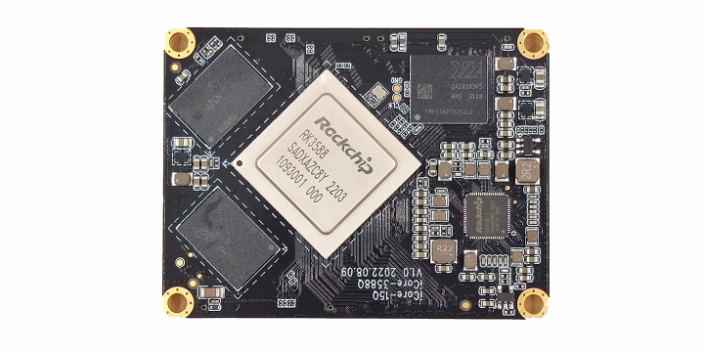
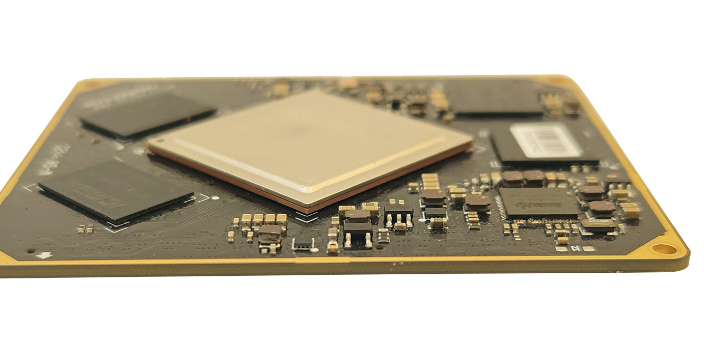
这样的无人机智慧“眼”可以通过搭载吊舱实现,吊舱内置各种规格的摄像机,能够实现多角度观察。而智能化则可以在吊舱的基础上植入高性能AI图像处理板。图像处理板能够对摄像机获取的图像进行AI智能分析,这样无人机就能够自动识别缺陷,然后进行信息留存、回传。在这个领域,成都慧视光电可以根据需求进行多接口图像处理板的定制,选择成都慧视开发的RK3588系列图像处理板,支持选择SDI、CVBS、LVDS、USB、cameralink等接口。RK3588拥有6.0TOPS的算力,能够在各种复杂环境进行稳定工作。板卡和识别算法的强强联合下,无论白天黑夜,无人机都可以实现自助巡检,就不需要过多的人工参与。也是一种降本增效的举措。安徽目标跟踪厂家电话慧视光电开发的慧视RK3588图像处理板,采用了国产高性能CPU。

现在城市里面植被丰富,天气干燥时加上不少树林落叶、枯枝和枯草,在室外烧纸、点火或乱扔烟头,就会容易引起火灾。国家明令禁止在公共场所吸烟,因此除了法律的约束,更加便捷的手段应该予以应用来弥补人力监管的不足。在火星识别领域,慧视光电开发的RV1126图像处理板,凭借小巧精悍的性能,优异的识别能力,具有重要作用。通过在传统监控、摄像头等设备中内置RV1126图像处理板,板卡将自带目标识别算法,能够对微小火星起到精确识别的功能,一旦目标区域出现火星,就能立刻向监管人员发出警报。反应时间越快,就越能杜绝火灾的发生,而快速响应的火星识别技术就是人力监管的得力帮手。
之所以能产生这种可见运动或表观运动,是因为物体以不同的速度在不同的方向上移动,或者是因为相机在移动(或者两者都有)在很多应用程序中,跟踪表观运动都是极其重要的。它可用来追踪运动中的物体,以测定它们的速度、判断它们的目的地。对于手持摄像机拍摄的视频,可以用这种方法消除抖动或减小抖动幅度,使视频更加平稳。运动估值还可用于视频编码,用以压缩视频,便于传输和存储。被跟踪的运动可以是稀疏的(图像的少数位置上有运动,称为稀疏运动),也可以是稠密的(图像的每个像素都有运动,称为稠密运动)跟踪视频中的特征点从前面章节介绍的内容可以看出,根据特殊的点分析图像,可以使计算机视觉算法更加实高效。慧视光电的图像处理板能够实现变倍锁定跟踪不丢失。

另外,经典的跟踪方法还有基于特征点的光流跟踪,在目标上提取一些特征点,然后在下一帧计算这些特征点的光流匹配点,统计得到目标的位置。在跟踪的过程中,需要不断补充新的特征点,删除置信度不佳的特征点,以此来适应目标在运动中的形状变化。本质上可以认为光流跟踪属于用特征点的来表征目标模型的方法。在深度学习和相关滤波的跟踪方法出现后,经典的跟踪方法都被舍弃,这主要是因为这些经典方法无法处理和适应复杂的跟踪变化,它们的鲁棒性和准确度都被前沿的算法所超越,但是,了解它们对理解跟踪过程是有必要的,有些方法在工程上仍然有十分重要的应用,常常被当作一种重要的辅助手段。RK3399图像处理板识别概率超过85%。可靠目标跟踪产品
慧视Viztra-HE030目标跟踪AI模块。宁夏目标跟踪销售厂家
目标跟踪算法具有不同的分类标准,可根据检测图像序列的性质分为可见光图像跟踪和红外图像跟踪;又可根据运动场景对象分为静止背景目标跟踪和运动背景下的目标跟踪。由于基于区域的目标跟踪算法用的是目标的全局信息,比如灰度、色彩、纹理等。因此当目标未被遮挡时,跟踪精度非常高、跟踪非常稳定,对于跟踪小目标效果很好,可信度高。但是在灰度级的图像上进行匹配和全图搜索,计算量较大,非常费时间,所以在实际应用中实用性不强;其次,算法要求目标不能有太大的遮挡及其形变,否则会导致匹配精度下降,造成运动目标的丢失。宁夏目标跟踪销售厂家
与目标跟踪相关的文章

流畅目标跟踪市场报价
- 湖北目标跟踪售后服务 2025-12-20
- 云南目标跟踪批发商 2025-12-20
- 福建附近目标跟踪 2025-12-20
- 专业目标跟踪要多少钱 2025-12-20
- 放心目标跟踪要多少钱 2025-12-19
- 哪里有目标跟踪进货价 2025-12-19
- 重庆目标跟踪参考价格 2025-12-19
- 新疆高效目标跟踪 2025-12-19
- 山东目标跟踪诚信推荐 2025-12-19
- 青海目标跟踪应用 2025-12-19
- 移动目标跟踪联系方式 2025-12-19
- 宁夏目标跟踪销售厂家 2025-12-19
与目标跟踪相关的产品



与目标跟踪相关的新闻
-
江苏信息化目标跟踪 2025-12-18 11:01:25在目标跟踪领域,场景信息与目标状态的融合十分重要,首先,场景信息包含了丰富的环境上下文信息,对场景信息进行分析及充分利用,能够有效地获取场景的先验知识,降低复杂的背景环境以及场景中与目标相似的物体的干扰;同样地,对目标的准确描述有助于提升检测与跟踪算法的准确性与鲁棒性.总之,尝试研究结合背景信息和前...
-
海南目标跟踪推荐厂家 2025-12-18 19:02:11自动化的视频跟踪系统的工作流程一般是摄像机的模拟信号通过视频电缆传送至计算机,计算机通过视频采集卡将模拟视频信号转换为数字视频信号,该转换的输出的数字图像一方面在计算机CRT上显示,同时传送至内存进行目标检测或跟踪(根据需要可同时进行硬盘录像),计算机根据算法的运算结果来控制摄像机的云台,这个控制过...
-
湖北目标跟踪服务电话 2025-12-18 02:01:30RK3588作为瑞芯微国产化旗舰级芯片,用在目标跟踪领域,通常情况下跟踪帧率都在50Hz左右,这已经足够满足大多数应用领域的需求。但在许多特殊领域,如军备、边防,高帧频的视频输出能够在极短的时间内捕捉到更多的画面,实现高速动态场景的连续拍摄。高帧频的目标跟踪则能够获得更多的目标细节,便于做出下一步判...
-
黑龙江比较好的目标跟踪 2025-12-18 20:01:48视觉目标跟踪是指在视频图像序列的各帧图像中找到被跟踪的目标。基于区域的跟踪的基本思想是通过图像分割或预先人为确定,提取包含着运动目标的运动变化的区域范围作为匹配的目标模板,然后把目标模板与实时图像在所有可能位置上进行叠加,然后计算某种图像相似性度量的相应值,其比较大相似性相对应的位置就是目标的位置,...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
天津网络目标识别系统
2025-12-19 -
山东目标跟踪诚信推荐
2025-12-19 -

青海目标跟踪应用
2025-12-19 -

移动目标跟踪联系方式
2025-12-19 -
宁夏目标跟踪销售厂家
2025-12-19 -
山西智能化目标识别
2025-12-19 -

吉林移动目标跟踪
2025-12-19 -
浙江高性能目标识别情况
2025-12-19 -
天津专业目标识别解决方案
2025-12-19