
相关滤波的跟踪算法始于2012年P.Martins提出的CSK方法,作者提出了一种基于循环矩阵的核跟踪方法,并且从数学上完美解决了密集采样(Dense Sampling)的问题,利用傅立叶变换快速实现了检测的过程。在训练分类器时,一般认为离目标位置较近的是正样本,而离目标较远的认为是负样本。回顾前面...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
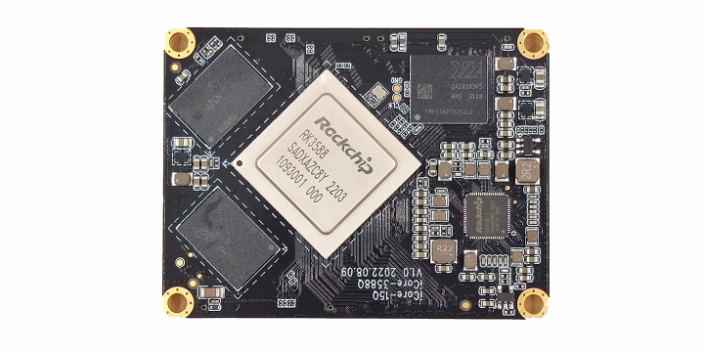
RK3588作为瑞芯微旗舰级芯片,工业级的算力受到了很多领域的青睐,但是由于前端相机的选择不同,并不是每块RK3588的图像处理板都可以直接拿来使用,需要的是根据相机接口和应用场景进行深度定制。成都慧视光电技术有限公司就有这样的快速集成定制的能力。作为拥有多年图像处理板开发经验的团队,成都慧视能够快速定制SDI、CVBS、CAMERALINK、USB、LVDS、DVP等丰富接口的RK3588系列图像处理板,并能够根据应用环境定制外壳、散热器等。相关滤波跟踪为模板跟踪方式,基于选定图像区域创建模板实现跟踪,可跟踪图像中任意指定区域。海南目标跟踪价格信息
目标跟踪
如今,无人机在我们生活中的应用越来越广。例如无人机巡检安防领域,无人机能够到达人无法触及的一些角度,能够很大程度上扩大安防检查的覆盖面。在工地、电力、化工等行业,晚上巡检是必不可少的环节,并且晚上巡检还能发现白天无法看到的一些问题,在白天,一般的相机效果很好,能够看到非常清晰的监控画面,但是到了晚上,就心有余而力不足。这是因为以前大多数相机都是可见光相机,在晚上光源不佳时,就会出现成像模糊、漆黑。这种解决办法是采用红外热像仪传感器,即使在漆黑的夜晚,通过红外成像也能展现出清晰的画面。重庆稳定目标跟踪小型飞行器跟踪设备。

实际上,跟踪和检测是分不开的,比如传统TLD框架使用的在线学习检测器,或KCF密集采样训练的检测器,以及当前基于深度学习的卷积特征跟踪框架。一方面,跟踪能够保证速度上的需要,而检测能够有效地修正跟踪的累计误差。不同的应用场合对跟踪的要求也不一样,比如特定目标跟踪中的人脸跟踪,在跟踪成功率、准确度和鲁棒性方面都有具体的要求。另外,跟踪的另一个分支是多目标跟踪(MultipleObjectTracking)。多目标跟踪并不是简单的多个单目标跟踪,因为它不仅涉及到各个目标的持续跟踪,还涉及到不同目标之间的身份识别、自遮挡和互遮挡的处理,以及跟踪和检测结果的数据关联等。
SpeedDP作为一个服务型AI平台,它能提供从数据标注、模型训练、测试验证到RockChip嵌入式硬件平台模型部署的可视化AI开发功能。平台所需算法并不是固定的,使用者可以根据自身实际应用场景进行AI算法的定制化开发,例如平台经过不断的迭代,目前能够支持YOLOv8系列算法进行图像标注。SpeedDP这个平台使用起来十分简便,在图像标注领域其基本使用方法是:1.首先有一个比较好的预选模型2.用这个预选模型做自动标注3.后期人工审核修正RV1126图像处理板是我司自主研发的目标跟踪板,该板卡采用国产高性能CPU,搭载自研目标跟踪及跟踪算法。

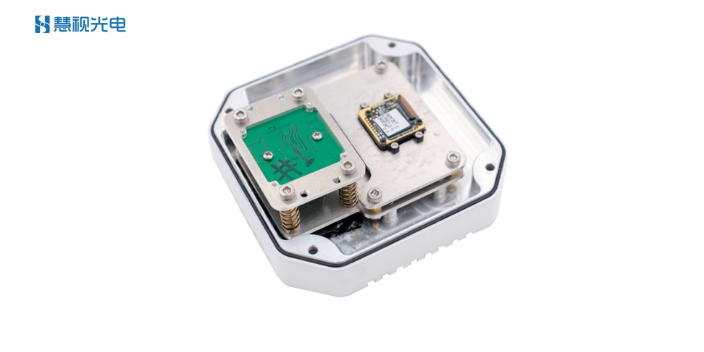
首先摄像机采用的是可见光高清摄像机,具备1920*1080的分辨率,系统视场31.11°×17.8°,其中搜索视场15.8°×15.8°(1080P像素)。而图像处理则采用慧视开发的RV1126高性能图像处理板,之所以采用这块板卡,一方面得益于其低功耗、微型外观的设计,非常契合“智慧眼”这样对于空间要求严格的应用场景;另一方面RV1126具备2.0TOPS的算力,在国产化方面也十分完整,安全性十足。两者结合,就能够形成重量不超过100g的“智慧眼”。在算法的作用下,能够达到≥50Hz的跟踪帧率,≥25Hz的检测帧率,实现捕获4m*4m目标超过800m、6m*6m目标超过1000m。这就是“机器狼”的智慧化措施,通过一个“小小的”“智慧眼”的加入,便能够让其实现许多自动化任务。随着技术的不断发展,“机器狼”的形态将会不断进步,满足更多多样化需求。慧视RV1126图像处理板能实现24小时、无间隙信息化监控。黑龙江国产目标跟踪
慧视AI算法是无人设备的“眼睛”。海南目标跟踪价格信息
无人机在军备领域有着突出作用,它不仅能帮助进行信息侦查,还能进行智能炮弹高空精细打击。其中,在智能精细打击领域,少不了人工智能的参与。通过人工智能的控制分析,能够实现对打击目标的AI识别。选择这样的方式,能够减少末端打击时对方电子干扰的影响,尽可能保证无人机的重复使用,图像处理设备显然比无人机本身更加经济。除了硬件方面,要实现这样的精细打击,算法的能力至关重要。在实际应用落地之前就需要大量的模拟试验来验证算法的识别能力,这个过程周期不可估量。传统方式下,需要大量的外场测试验证,整个流程繁琐费时费力。而这个工具的出现,则很好的优化了这个过程。海南目标跟踪价格信息
与目标跟踪相关的文章

流畅目标跟踪市场报价
- 湖北目标跟踪售后服务 2025-12-20
- 云南目标跟踪批发商 2025-12-20
- 福建附近目标跟踪 2025-12-20
- 专业目标跟踪要多少钱 2025-12-20
- 放心目标跟踪要多少钱 2025-12-19
- 哪里有目标跟踪进货价 2025-12-19
- 重庆目标跟踪参考价格 2025-12-19
- 新疆高效目标跟踪 2025-12-19
- 山东目标跟踪诚信推荐 2025-12-19
- 青海目标跟踪应用 2025-12-19
- 移动目标跟踪联系方式 2025-12-19
- 宁夏目标跟踪销售厂家 2025-12-19
与目标跟踪相关的产品



与目标跟踪相关的新闻
-
江苏信息化目标跟踪 2025-12-18 11:01:25在目标跟踪领域,场景信息与目标状态的融合十分重要,首先,场景信息包含了丰富的环境上下文信息,对场景信息进行分析及充分利用,能够有效地获取场景的先验知识,降低复杂的背景环境以及场景中与目标相似的物体的干扰;同样地,对目标的准确描述有助于提升检测与跟踪算法的准确性与鲁棒性.总之,尝试研究结合背景信息和前...
-
海南目标跟踪推荐厂家 2025-12-18 19:02:11自动化的视频跟踪系统的工作流程一般是摄像机的模拟信号通过视频电缆传送至计算机,计算机通过视频采集卡将模拟视频信号转换为数字视频信号,该转换的输出的数字图像一方面在计算机CRT上显示,同时传送至内存进行目标检测或跟踪(根据需要可同时进行硬盘录像),计算机根据算法的运算结果来控制摄像机的云台,这个控制过...
-
湖北目标跟踪服务电话 2025-12-18 02:01:30RK3588作为瑞芯微国产化旗舰级芯片,用在目标跟踪领域,通常情况下跟踪帧率都在50Hz左右,这已经足够满足大多数应用领域的需求。但在许多特殊领域,如军备、边防,高帧频的视频输出能够在极短的时间内捕捉到更多的画面,实现高速动态场景的连续拍摄。高帧频的目标跟踪则能够获得更多的目标细节,便于做出下一步判...
-
黑龙江比较好的目标跟踪 2025-12-18 20:01:48视觉目标跟踪是指在视频图像序列的各帧图像中找到被跟踪的目标。基于区域的跟踪的基本思想是通过图像分割或预先人为确定,提取包含着运动目标的运动变化的区域范围作为匹配的目标模板,然后把目标模板与实时图像在所有可能位置上进行叠加,然后计算某种图像相似性度量的相应值,其比较大相似性相对应的位置就是目标的位置,...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
天津网络目标识别系统
2025-12-19 -

山东目标跟踪诚信推荐
2025-12-19 -

青海目标跟踪应用
2025-12-19 -

移动目标跟踪联系方式
2025-12-19 -
宁夏目标跟踪销售厂家
2025-12-19 -
山西智能化目标识别
2025-12-19 -
吉林移动目标跟踪
2025-12-19 -
浙江高性能目标识别情况
2025-12-19 -
天津专业目标识别解决方案
2025-12-19