(上篇)车载自带算法的疲劳驾驶预警集成MDVR实现云台管理的原理
车载疲劳驾驶预警系统与MDVR(MobileDigitalVideoRecorder,移动数字视频录像机)集成,结合云台管理,可以实现对驾驶员状态的实时监控、数据存储和远程管理。以下是其工作原理和实现细节:
1.系统架构集成MDVR的疲劳驾驶预警系统主要包括以下模块:
-摄像头模块:用于采集驾驶员面部图像和车内环境视频。
-云台控制模块:调整摄像头角度,确保ZUI佳监控范围。
-MDVR模块:负责视频录制、存储和传输。-疲劳检测算法模块:实时分析驾驶员状态,判断是否疲劳。
-通信模块:实现车载设备与云平台的数据传输。
-云平台:用于远程管理、数据分析和预警通知。
2.工作原理
2.1数据采集-摄像头采集:-摄像头实时捕捉驾驶员面部图像,用于疲劳检测。-同时录制车内环境视频,存储到MDVR中。-传感器数据:-结合方向盘传感器、车速传感器等,提供辅助判断数据。
2.2疲劳检测算法-实时分析:-车载终端运行轻量化的疲劳检测算法,分析摄像头采集的图像。-检测指标包括闭眼频率、打哈欠次数、头部姿态等。-多模态融合:-结合传感器数据(如方向盘转动频率、车速变化),提高检测准确性。 通过远程监控中心或云平台实时查看车辆的视频画面和疲劳状态信息,对驾驶员的驾驶行为进行远程监控和管理.青海物流车疲劳驾驶预警系统
(上篇)在疲劳驾驶集成MDVR系统中,TTS喇叭和对讲手柄是怎样通过智慧云平台下发指令对车端进行交互控制,监控实时作业情况?
在疲劳驾驶集成MDVR(MobileDigitalVideoRecorders,车载数字视频录像机)系统中,TTS喇叭和对讲手柄通过智慧云平台下发指令对车端进行交互控制,并监控实时作业情况的过程,涉及多个技术环节和设备的协同工作。以下是对这一过程的详细解析:
一、系统架构与组件功能
1.智慧云平台:作为整个系统的控制中心,云平台负责接收、处理并下发指令给车端设备。它提供API接口,用于接收来自用户或其他系统的请求,并根据请求内容生成相应的控制指令。
2.MDVR系统:安装在车辆上,负责采集、存储和传输车内外视频数据,同时具备GPS定位、无线传输等功能。MDVR系统作为车端的核XIN设备,与云平台进行通信,接收并执行来自云平台的指令。
3.TTS喇叭:文本到语音(TextToSpeech)的合成设备,用于将云平台下发的文本指令转化为语音信号,以便驾驶员能够听到并执行。
4.对讲手柄:用于驾驶员与云平台或其他车辆进行语音通信的设备。它通常具有PTT(PushToTalk)功能,即按住按钮即可说话,松开按钮则停止说话。 广东林肯司机行为检测预警系统疲劳驾驶预警系统利用先进的图像处理算法,如图像滤波,边缘检测等,对采集到的图像进行深度分析和处理.

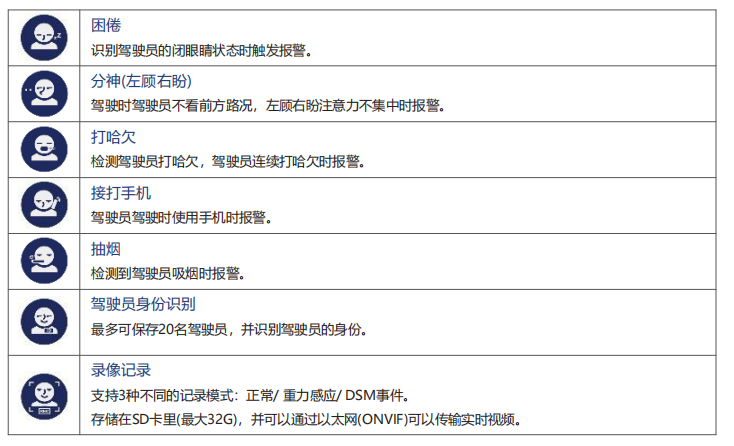
(第2篇)广州精拓智能的驾驶员状态监测仪是一款集成了独L算法的智能设备,具备高度精细的驾驶员状态监测能力。以下将从功能特点、安装应用注意事项以及七大预警方式的报警机制三个维度进行详细解析。
5.低功耗与安全设计
-工作电压为DC12V,最大功率4.0瓦特,节能高效。、
-红外补光采用940nm远红外不可见光,对人眼无伤害。
-指示灯亮度微弱,不干扰驾驶员视线。
二、安装应用注意事项
1.安装位置选择
-比较好位置:正前方仰视驾驶员无遮挡的位置,偏移驾驶员正面中YANG不超过10cm。
-避免遮挡:不能被方向盘遮挡,且安装位置应清洁无杂物。
-推荐距离:产品与驾驶员面部的直线距离应在65cm~125cm之间,比较大不超过180cm。
2.安装步骤
(1.)清洁安装区域,移除可能遮挡镜头的杂物;
(2.)使用内六角扳手卸下支架,用3M胶或螺钉固定;
(3.)将产品主体安装在支架上,调整角度直至镜头中出现驾驶员倒影;
(4.)固定螺钉后接通电源,确认启动正常(红灯闪烁、提示音响起);
(5.)初次识别成功后,绿灯亮起表示设备进入正常工作状态。
3.调试建议
-推荐将CVBS视频输出接入显示器,便于实时观察检测区域;
-通过观察视频图像调整设备角度,确保面部特征区域完整覆盖。
(第3篇)精拓智能CL-880-2疲劳驾驶预警系统:矿区无网环境下的安全保障方案
四、部署建议
安装位置:仪表盘正上方或方向盘正中,确保摄像头与驾驶员面部间距45~95cm,无遮挡。
联动设备:建议外接方向盘震动模块(支持5V峰值电压触发),增强预警效果。
数据管理:定期通过U盘导出MDVR数据,结合本地平台生成安全报表,优化驾驶员管理。
总结:
精拓智能CL-880-2通过本地化算法、离线存储、抗极端环境设计三大核X能力,实现“监测-分析-预警-记录”全流程无网运行,完美解决矿区网络不稳定痛点,为矿车驾驶安全提供全天候保障。
自带算法的疲劳驾驶预警系统通过其丰富的外接设备联动接口,连接方向盘振动器,座椅振动器,实现预警功能.

(篇二)DSM-7疲劳驾驶预警系统是一种重要的汽车安全辅助系统,它通过监测驾驶员的生理反应和驾驶行为来判断驾驶员是否处于疲劳状态,并及时发出预警,以减少因疲劳驾驶引发的交通事故。PCI盒子作为疲劳驾驶预警系统的一部分,通常用于连接外WEI设备和主机,实现数据的采集、处理和传输。以下是对PCI盒子外WEI设备连接主机、振动器、CAN线、视频输出和232串口线的详细阐述:
3.CAN线连接功能:CAN(ControllerAreaNetwork)线是一种用于连接汽车内部各电子控制单元(ECU)的串行通信协议。在疲劳驾驶预警系统中,CAN线可以用于实现系统与车辆其他系统(如发动机控制系统、刹车系统等)之间的通信和数据交换。CAN线通常通过专YONG的CAN接口连接到PCI盒子或系统的其他通信模块上。这些接口符合CAN协议标准,能够确保数据的可靠传输和系统的稳定运行。
4.视频输出功能:视频输出是疲劳驾驶预警系统的一种重要功能,用于显示驾驶员的实时视频画面、预警信息或系统状态等。这有助于驾驶员直观地了解自身状态和系统的工作情况。连接方式:视频输出通常通过视频接口(如HDMI、VGA等)连接到显示器或触摸屏等显示设备上。这些接口能够提供高质量的视频信号,确保画面的清晰度和稳定性。 DSM-7疲劳驾驶预警系统PCI盒子会插入主机的PCIe插槽中,通过插槽提供的电力和数据通道与主机进行通信.青海物流车疲劳驾驶预警系统
自带算法的疲劳驾驶预警系统,利用神经网络人工智能视觉算法对驾驶员的脸部,眼部,体态等特征进行智能分析.青海物流车疲劳驾驶预警系统
(中篇)自带算法的疲劳驾驶预警系统是一种智能化的安全设备,它能够通过分析驾驶员的生理特征、驾驶行为及车辆行驶状态等信息,实时监测驾驶员的疲劳状态,并在必要时发出预警信号。以下是对该系统的报警状态及报警参数的详细阐述:
这是为了确保在正常的驾驶速度下,系统能够有效地发挥作用。驾驶员行为:如明显的打哈欠行为、长时间低头、视线偏离正常范围等,都可能触发预警。摄像头遮挡:如果系统摄像头被遮挡超过一定时间(如15秒),也会触发预警,以提醒驾驶员确保摄像头清晰可见。报警阈值:报警阈值是指系统触发预警的条件阈值。例如,眨眼频率、闭眼时间、头部运动幅度等参数达到或超过一定阈值时,系统会认为驾驶员处于疲劳状态并触发预警。这些阈值通常根据大量的实验数据和统计分析得出,以确保预警的准确性和可靠性。灵敏度等级:一些系统可能提供灵敏度等级设置,以便用户根据实际需求进行调整。灵敏度等级越高,系统对驾驶员行为和车辆状态的监测越敏感,触发预警的可能性也越大。反之,灵敏度等级越低,系统则相对更加“宽容”,触发预警的条件也更加严格。 青海物流车疲劳驾驶预警系统