(中篇)在疲劳驾驶集成MDVR系统中,TTS喇叭和对讲手柄是怎样通过智慧云平台下发指令对车端进行交互控制,监控实时作业情况?
二、指令下发与交互控制流程
1.用户请求生成:用户通过移动应用或网页界面向智慧云平台发出请求,例如要求监控某辆车的实时作业情况或向驾驶员下发语音指令。
2.云平台接收并处理请求:云平台接收到用户请求后,进行解析和处理。根据请求内容,云平台生成相应的控制指令,并通过选定的通信协议(如HTTP、MQTT等)将指令发送给MDVR系统。
3.MDVR系统接收指令:MDVR系统接收到来自云平台的指令后,进行解析并根据指令内容执行相应的操作。例如,如果指令是要求监控实时作业情况,MDVR系统将启动视频采集和传输功能;如果指令是要求向驾驶员下发语音指令,MDVR系统则将指令发送给TTS喇叭。
4.TTS喇叭合成语音并播放:TTS喇叭接收到来自MDVR系统的文本指令后,将其合成为语音信号并播放出来。这样,驾驶员就能听到来自云平台的语音指令,并根据指令执行相应的操作。
5.对讲手柄进行语音通信:在需要时,驾驶员可以通过对讲手柄与云平台或其他车辆进行语音通信。这有助于实时交流信息、协调作业或处理紧急情况。 疲劳驾驶预警系统实现ONVIF视频输出的技术,涉及到视频捕捉,处理,传输及符合ONVIF协议标准的接口设计.安徽司机司机行为检测预警系统
(上篇)自带算法的疲劳驾驶预警系统中,GPS的功能并不仅限于获得车速信息,但确实在这一方面发挥着重要作用。以下是对GPS在疲劳驾驶预警系统中获得车速信息功能的详细阐述:
一、GPS获取车速信息的基本原理GPS(全球定位系统)通过接收卫星信号来确定车辆的位置,并基于位置随时间的变化来计算车速。具体来说,GPS系统会不断记录车辆在一定时间间隔内的位置坐标,然后通过计算这些位置坐标之间的直线距离和时间差,得出车辆的平均速度。这种方法虽然相对简单,但在大多数情况下能够提供较为准确的车速信息。
二、GPS在疲劳驾驶预警系统中的应用车速监测与预警:疲劳驾驶预警系统通常会根据车速来判断驾驶员的疲劳程度。例如,当车速过高且持续时间较长时,系统会认为驾驶员可能处于疲劳状态,从而发出预警。此时,GPS提供的车速信息就显得尤为重要。行驶轨迹记录:除了提供车速信息外,GPS还可以记录车辆的行驶轨迹。这对于分析驾驶员的驾驶习惯、判断驾驶员是否疲劳驾驶以及为事故调查提供线索等方面都具有重要意义。结合其他传感器数据:在疲劳驾驶预警系统中,GPS通常会与其他传感器(如加速度传感器、方向盘传感器等)结合使用,以提供更全MIAN、准确的驾驶员状态信息。
山东货车司机行为检测预警系统自带算法的疲劳驾驶预警系统具有良好的兼容性和可扩展性,可以与车辆的其他安全系统进行集成和联动.

(上篇)自带算法的疲劳驾驶预警系统采用独特的图像识别技术,能够在复杂多变的驾驶环境中有效监测驾驶员的疲劳状态,同时避免外界光源对监测效果的干扰。以下是对该系统如何避免外界光源干扰的详细阐述:
一、光源校准与滤光技术光源校准:系统使用光源校准工具对光照进行精确校准,确保检测环境内光照条件的一致性和稳定性。这有助于减少不同光源带来的亮度差异,从而降低干扰。滤光器应用:通过应用滤光器,系统能够过滤掉特定波长的光线,只允许特定波长的光线通过。这种技术有助于减少光线反射和散射造成的干扰,提高图像识别的准确性。
二、偏振光源与偏振片的使用系统采用偏振光源和偏振片,通过控制光的偏振方向来消除不需要的背景光和杂散光。这种方法能够只保留检测所需的偏振方向的光,从而有效避免外界光源的干扰。
三、图像预处理与增强技术图像去噪与增强:在图像识别过程中,系统首先对采集到的图像进行去噪和增强处理。这有助于提高图像质量,减少因光源干扰而产生的噪声和伪影。特征提取与匹配:系统从处理后的图像中提取有用的特征信息,如颜色、纹理、形状等,并与已知特征库进行匹配。这一过程能够进一步降低外界光源对识别效果的影响。
(第1篇)精拓智能CL-880-2疲劳驾驶预警系统:矿区无网环境下的安全保障方案
一、系统独特功能:本地化与抗极端环境设计
全离线运行核X:神经网络算法本地化部署
系统内置神经网络人工智能视觉算法,通过摄像头与传感器实时采集驾驶员面部特征(眨眼频率、闭眼时长、头部运动)及体态数据,在设备端完成疲劳状态分析与预警,无需依赖云端计算或网络传输。
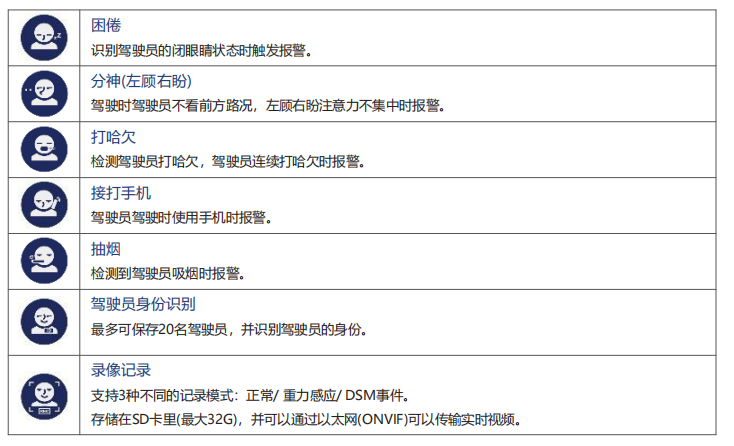
关键性能:疲劳特征趋势预警准确率达95%,危险驾驶行为识别响应时间<0.5秒,支持闭眼、打哈欠、左顾右盼等行为识别(准确率>99%)。
MDVR本地存储与数据闭环集
成车载数字视频录像机(MDVR),驾驶员影像、车辆轨迹、速度等数据直接存储于本地SD卡或硬盘,支持离线视频同步输出与历史数据追溯。网络恢复后可手动导出或补传,解决矿区网络波动导致的数据丢失问题。
多模态无网预警机制
提供声音预警(中文/英文语音)、方向盘震动、座椅震动等硬件级联动报警,预警信号通过设备端口直接触发,无需网络交互。驾驶员可根据习惯调节灵敏度,适配矿区复杂路况下的驾驶需求。
二、矿区场景专项优势:环境适配与安全强化
抗干扰光学成像与极端环境耐受性
自带算法的疲劳驾驶预警系统具有智能识别与分析,全天候工作能力,多功能预警和远程监控与管理等主要特征.

(上篇)DSM-7疲劳驾驶预警系统的安装位置推荐主要基于其图像采集模块需要时时刻刻监测到驾驶员面部的需求。以下是具体的安装位置推荐:
一、主要安装位置中控台:中控台是驾驶员视线范围内的常见位置,便于安装疲劳驾驶预警系统的图像采集模块。安装在此处可以确保摄像头能够清晰地捕捉到驾驶员的面部特征。仪表盘:仪表盘也是驾驶员经常关注的位置,适合安装疲劳驾驶预警系统。摄像头可以隐藏在仪表盘内部或边缘,以不干扰驾驶员视线为前提。左侧A柱:左侧A柱靠近驾驶员,是另一个可行的安装位置。但需确保摄像头不会阻挡驾驶员的视线或造成安全隐患。转向柱后壳体:转向柱后壳体同样是一个可以考虑的安装位置。但同样需要注意不要干扰驾驶员的正常驾驶操作。顶棚组合开关:在一些车型中,顶棚组合开关附近也有足够的空间来安装疲劳驾驶预警系统。但这种安装方式可能需要更多的安装和调整工作,以确保摄像头的角度和清晰度。
当系统检测到驾驶员处于疲劳状态时,会立即通过方向盘振动器和座椅振动器向驾驶员发出预警信号.广西新能源汽车司机行为检测预警系统
自带算法的疲劳驾驶预警系统通过其独特的图像识别技术和强大的抗干扰能力,实现了全天候巡航监测功能.安徽司机司机行为检测预警系统
(下篇)自带算法的疲劳驾驶预警系统采用独特的图像识别技术,能够在复杂多变的驾驶环境中有效监测驾驶员的疲劳状态,同时避免外界光源对监测效果的干扰。以下是对该系统如何避免外界光源干扰的详细阐述:
六、实际应用中的验证与调整在实际应用中,系统会根据不同场景和光照条件进行验证和调整。通过收集和分析大量实际数据,系统能够不断优化算法和参数,以适应更复杂多变的光照环境。
综上所述,自带算法的疲劳驾驶预警系统通过采用光源校准、滤光技术、偏振光源与偏振片的使用、图像预处理与增强技术、先进的图像处理算法以及硬件与软件的协同优化等措施,能够有效地避免外界光源对监测效果的干扰。这些措施共同构成了系统独特的图像识别技术,为驾驶员提供准确、可靠的疲劳驾驶预警FU务。 安徽司机司机行为检测预警系统