
而维修机器人则能够通过图像识别、精细远程控制技术,实现远程快速维修,通过加装高性能图像处理板,机器人能够精细电网缺陷以及损坏程度,并通过摄像头实时回传高清画面,工程师只需要远程操控机器人进行修补,实现精细缝合。整个过程只需要极少数的人员参与,整个巡检维修的时间能够从7小时缩减到1小时,极大地保障了电...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
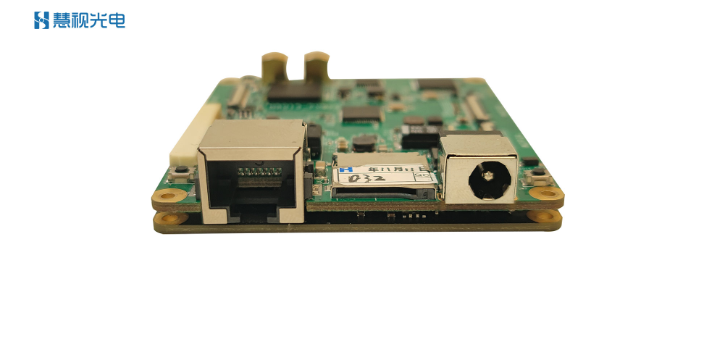
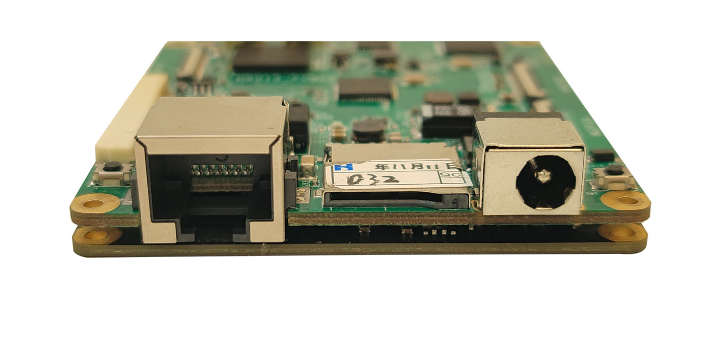
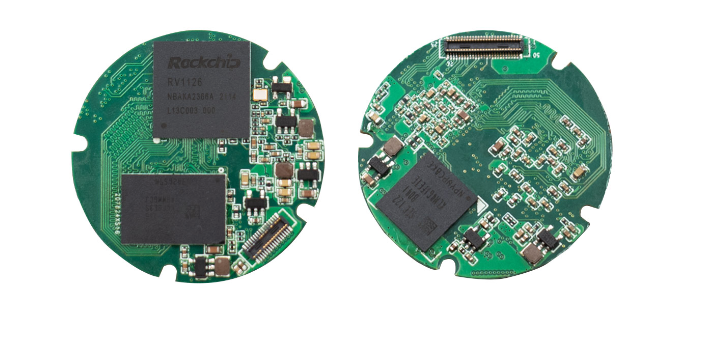
无人机夜间工作时需要依靠红外机芯进行高清成像,而想要具备AI检测识别的能力则可以通过植入图像处理板。成都慧视可以根据需求提供整套的建设方案,实现快速集成开发。慧视Viztra-LE026图像处理板+MiNO 17红外机芯的组合方案,两款产品均使用小巧设计,整体组合重量在30g左右,并且都采用小功耗设计,用在无人机领域不会过多增加负担。在算法的赋能下,能够实现稳定的目标检测识别。Viztra-LE026图像处理板重量在10g左右,采用了瑞芯微全国产化芯片RV1126,能够输出2.0TOPS的算力,功耗不高于4W。能够以30Hz帧率跟踪像素2*2的目标,能够识别像素为12*12的目标,且识别率高于85%。而MiNO 17红外机芯重量在20g左右(净重5g(不含镜头)),像素分辨率为640*512,采用9/13/25mm三种定焦设计,支持18中伪彩选择,功耗小于0.75W。慧视光电基于AI图像处理的监控监管方案能够实现安全生产。浙江快速目标跟踪
目标跟踪
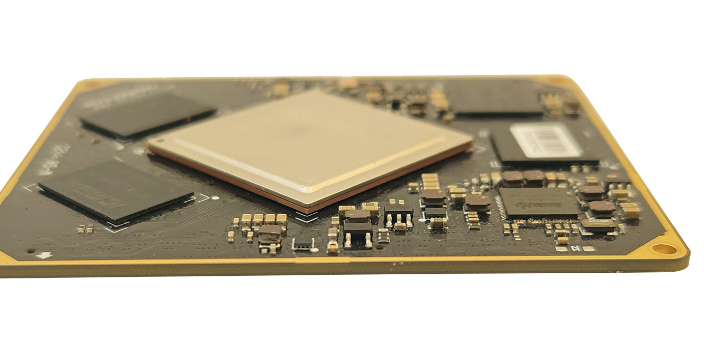
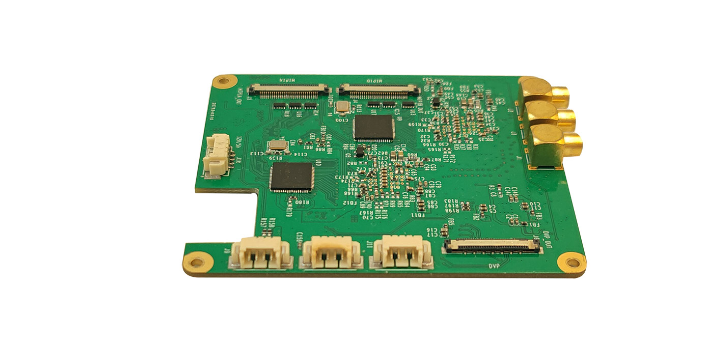
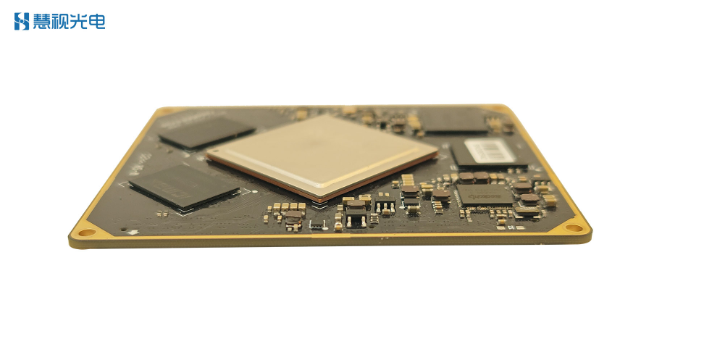
此前,九号电动车的自平衡技术一次次刷新人们的认知,而其中一款探索版车型,甚至加入了智能摄像头,能够识别行人、障碍物,自动规划行驶路线,达成自动驾驶的目的。很多人好奇这种怎么做到的,其实很简单,车辆内部摄像头安装了具备图像处理的传感器。这种传感器就是图像处理板,这类AI板卡在目标识别算法的赋能下,就能够对视野范围的物体进行AI分类识别,从而帮助车辆进行避障。像成都慧视开发的高性能AI图像处理板Viztra-HE030,采用的是RK3588开发而成,凭借其工业级的性能,6.0TOPS的算力,就能够在车辆行驶过程中的复杂环境下进行周边环境的快速AI识别分类。当然,算法的能力也十分关键,由于车辆行驶环境的不断变化,算法面临的识别画面也不断变化,如何精细的进行识别,关系到车辆的行驶安全。稳定目标跟踪工程RK3399PRO图像处理板是我司自主研发的目标跟踪板,该板卡采用国产高性能CPU,搭载自研目标跟踪及跟踪算法。

由于侵入的目标的形状和颜色等特征是难以固定的,再加上监控的场景,即背景往往比较复杂,只利用一个单帧图像就找出移动的目标是非常困难的。然而,目标的运动导致了其运动时间内,监控场景图像的连续变化,所以,使用图像序列分析往往是比较有效的,而且适合于低信噪比的情况。由于监控系统通常监控的视野比较大,系统设置的环境较为恶劣,图像传输的距离较远,从而导致图像的信噪比不高,因此采用突出目标的方法,需要在配准的前提下进行多帧能量积累和噪声抑制。在该技术中,要研究的问题有,相邻的两幅或多幅图像之间的关系是什么关系,是简单的图像差的值,还是多幅之间差的最大值,还是其他的与图像减法之间的其他函数关系,是尤其需要研究的。在研究中,研究如何差,如何自动得到差图像的分割门限,如何减小背景和突出目标是研究的方向。
在无人机识别这个领域,应用十分广,因此针对于这方面的教学必不可少。目前国产化的识别传感器当属瑞芯微的RK3588,因此许多院校都会选择采用RK3588来进行教学,成都慧视开发的Viztra-HE030图像处理板就是利用RK3588打造而成,能够根据不同规格的相机深度定制接口。(不同接口的RK3588图像处理板)如果院校想进一步节约时间提升效率,成都慧视还可以提供训练学习设备的整套方案。在高性能Viztra-HE030图像处理板的基础上,根据需求帮助选择合适的相机,并且针对算法这块,我们能够提供一个高效的深度学习算法开发平台SpeedDP,这个平台能够通过大量的识别检测算法模型训练开发,实现对新数据集的快速AI自动图像标注,一方面省去大量手动标注工作,另一方面帮助提升算法性能。RK3588作为慧视光电开发的全国产化工业级板卡,具备高性能、高精度的优点。

目标检测与目标跟踪这两个任务有着密切的联系。针对目标跟踪任务,微软亚洲研究院提出了一种通过目标检测技术来解决的新视角,采用简洁、统一而高效的“目标检测+小样本学习”框架,在多个主流数据集上均取得了杰出性能。目标跟踪(Object tracking)与目标检测(Object detection)是计算机视觉中两个经典的基础任务。跟踪任务需要由用户指定跟踪目标,然后在视频的每一帧中给出该目标所在的位置,通常由一系列的矩形边界框表示。而检测任务旨在定位图片中某几类物体的坐标位置。对物体的检测、识别和跟踪能够有效地帮助机器理解图片视频的内容,为后续的进一步分析打下基础。AI图像处理板能实现24小时、无间隙信息化监控。信息化目标跟踪联系方式
工程师以RK3399PRO核心板为基础进行定制开发,让摄像头更加智能高效,能够输出高清流的图像视频。浙江快速目标跟踪
另外,经典的跟踪方法还有基于特征点的光流跟踪,在目标上提取一些特征点,然后在下一帧计算这些特征点的光流匹配点,统计得到目标的位置。在跟踪的过程中,需要不断补充新的特征点,删除置信度不佳的特征点,以此来适应目标在运动中的形状变化。本质上可以认为光流跟踪属于用特征点的来表征目标模型的方法。在深度学习和相关滤波的跟踪方法出现后,经典的跟踪方法都被舍弃,这主要是因为这些经典方法无法处理和适应复杂的跟踪变化,它们的鲁棒性和准确度都被前沿的算法所超越,但是,了解它们对理解跟踪过程是有必要的,有些方法在工程上仍然有十分重要的应用,常常被当作一种重要的辅助手段。浙江快速目标跟踪
与目标跟踪相关的文章
工业目标跟踪功效
- 青海目标跟踪解决 2025-12-23
- 多系统适配目标跟踪批发价格 2025-12-23
- 重庆目标跟踪型号 2025-12-23
- 四川稳定目标跟踪 2025-12-23
- 辽宁省时省力目标跟踪 2025-12-23
- 山东目标跟踪厂家电话 2025-12-22
- 云南目标跟踪应用 2025-12-22
- 广东目标跟踪优势 2025-12-22
- 工业目标跟踪经验丰富 2025-12-22
- 青海目标跟踪参考价格 2025-12-22
- 浙江自主可控目标跟踪 2025-12-21
- 无源目标跟踪联系方式 2025-12-21


与目标跟踪相关的新闻
-
湖北质量目标跟踪 2025-12-21 02:01:18无人装备作战狼群,有“狼”负责侦查,有“狼”负责打击,而有的“狼”则负责后勤保障,这种无人装备集群作战能够有效辅助特种作战。“机器狼”的升级之所以能够满足多样化的任务,得益于其智能化的建设。就是下面这样的一个"智慧眼"的加入,使得机器狼能够自主完成许多任务。这个智慧眼由光学系统(彩色图像)、摄像机、...
-
贵州目标跟踪服务电话 2025-12-21 11:01:30RK3588作为瑞芯微旗舰级芯片,工业级的算力受到了很多领域的青睐,但是由于前端相机的选择不同,并不是每块RK3588的图像处理板都可以直接拿来使用,需要的是根据相机接口和应用场景进行深度定制。成都慧视光电技术有限公司就有这样的快速集成定制的能力。作为拥有多年图像处理板开发经验的团队,成都慧视能够快...
-
自主可控目标跟踪市场报价 2025-12-21 00:11:55目标跟踪是在首帧中给定待跟踪目标的情况下,对目标进行特征提取,对感兴趣区域进行分析;然后在后续图像中找到相似的特征和感兴趣区域,并对目标在下一帧中的位置进行预测。作为计算机视觉领域的一个热点研究方向,目标跟踪一直都是一项具有挑战性的工作。目标跟踪技术在导弹制导、智能监控系统、视频检索、无人驾驶、人机...
-
放心目标跟踪性价比 2025-12-21 09:01:28用检测器模型去解决跟踪问题,遇到的比较大问题是训练数据不足。普通的检测任务中,因为检测物体的类别是已知的,可以收集大量数据来训练。例如 VOC、COCO 等检测数据集,都有着上万张图片用于训练。而如果我们将跟踪视为一个特殊的检测任务,检测物体的类别是由用户在首先帧的时候所指定的。这意味着能够用来训练...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
黑龙江网络目标识别定制
2025-12-28 -
广东无源目标识别软件
2025-12-28 -

青海网络目标识别创意
2025-12-28 -
国产化目标识别开发
2025-12-28 -
广西哪里有目标识别联系方式
2025-12-28 -

重庆稳定目标识别经验丰富
2025-12-28 -

天津如何目标识别远程协助
2025-12-28 -
湖南低压线目标识别远程控制
2025-12-28 -
河南国产目标识别自主可控
2025-12-28