无人机在军备领域有着突出作用,它不仅能帮助进行信息侦查,还能进行智能炮弹高空精细打击。其中,在智能精细打击领域,少不了人工智能的参与。通过人工智能的控制分析,能够实现对打击目标的AI识别。选择这样的方式,能够减少末端打击时对方电子干扰的影响,尽可能保证无人机的重复使用,图像处理设备显然比无人机本身更...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
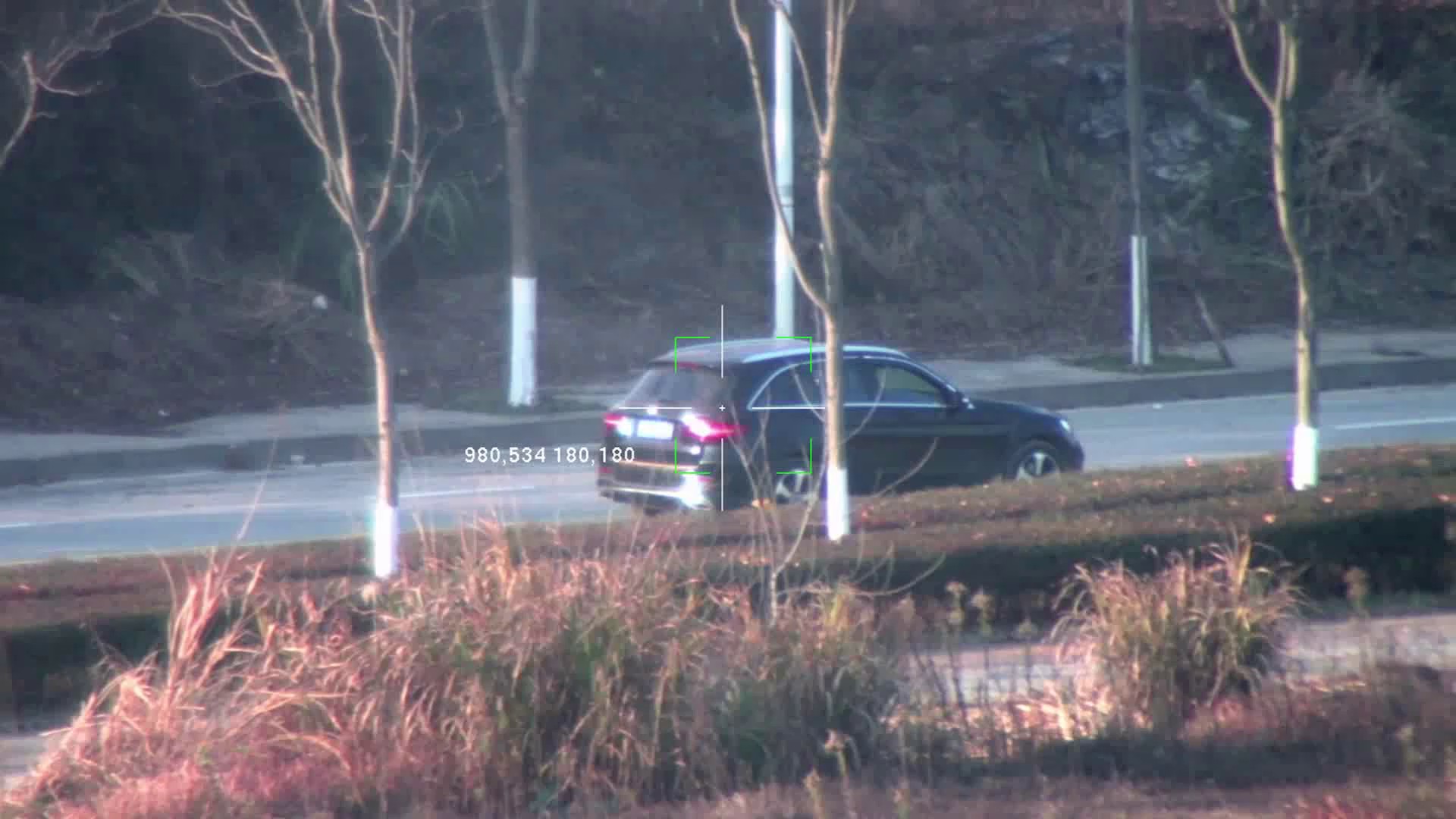
基于特征匹配的跟踪方法不考虑运动目标的整体特征,通过有目的的提取序列图像中的过零点、边缘轮廓、线段等相关特征或是部分特性,并建立匹配模板,对目标对象进行特征匹配,达到对目标对象跟踪的目的。假定运动目标可以由惟一的特征**表达,搜索到该相应的特征就认为跟踪上了运动目标。除了用单一的特征来实现跟踪外,还可以采用多个特征信息融合在一起作为跟踪特征。该算法主要包括特征提取和特征匹配两个方面。其中,特征提取指的是针对所包含的目标对象的序列图像选择合适的目标跟踪特性。慧视光电的图像处理板跟踪精度小于1个像素。青海目标跟踪解决
目标跟踪
在智慧农业领域可以分为人工干涉和无人值守2种。系统提供了良好的人机界面,用户可以通过系统的视频显示区观看摄像机摄制的现场视频,此时,用户可以人工通过系统提供的按钮以各种方式控制云台,即人工可以干涉监控的过程。系统在大部分情况下处于无人值守的工作状态,当监控中心的计算机系统收到外场设备的预警信号后,将自动向摄像机云台发出控制信号,控制摄像机将发生报警区域的图像锁定在监视器上,并同时按系统的设定调整好焦距,视野大小等。然后系统自动转入运动检测,检测当前区域是否有运动目标,如果有运动目标,则系统给出目标的一般性描述,提交给目标跟踪模块,对目标进行跟踪。在这过程中,系统将作日志,记录事故位置、时间等,同时对采集到的图像作硬盘录像。广东无源目标跟踪智能跟踪结合AI识别与相关滤波跟踪算法。

在很长一段时间内,传统的粮库害虫检查方法是依靠人工巡检,用肉眼观察,逐仓筛查的方法,这种方法覆盖面不足且效率低下,筛查一次将耗费工作人员的大量时间精力。随着技术的发展,AI化的筛查逐步采用,通过算法的AI识别实现自动化筛查。方法基于高像素高清摄像机,实时远程监控粮库,一旦发现害虫就能够立即向管理平台发出告警,有效降低巡检成本和压力,提升工作效率。这之中,实现AI识别处理的传感器同样重要,面对复杂的粮库环境,一个高性能能够快速处理数据的图像处理板是关键。
无人机在农业领域能够实现高效率的施肥、播种等操作。但是不同的作业环境对于无人机的工作性能要求不一样,同样的方案在平原地区适用,在高原地区就不行。因此针对于特殊作业环境需要制定不同的智慧化方案。像青藏高原这样地貌复杂、低气压、大温差的特点,参与智能化工作的各个部件需要符合这样作业环境特点的性能要求。不比平原的一马平川,高原由于环境复杂,地形起伏对于无人机的飞行也需要进行控制,无论是高度还是速度甚至距离都需要进行严格限制,防止出现撞机等事故。因此,这个方面的智慧化建设就需要无人机具备智能避障的功能,无人机需要在高速度或者远距离的情况下识别树木、电线杆、石头等障碍物,并能够实现避障。慧视图像处理板能够实现抖动锁定跟踪不丢失。

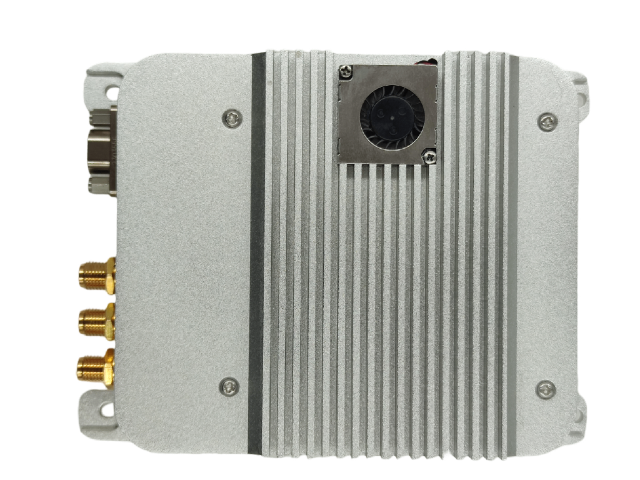
无人机夜间工作时需要依靠红外机芯进行高清成像,而想要具备AI检测识别的能力则可以通过植入图像处理板。成都慧视可以根据需求提供整套的建设方案,实现快速集成开发。慧视Viztra-LE026图像处理板+MiNO 17红外机芯的组合方案,两款产品均使用小巧设计,整体组合重量在30g左右,并且都采用小功耗设计,用在无人机领域不会过多增加负担。在算法的赋能下,能够实现稳定的目标检测识别。Viztra-LE026图像处理板重量在10g左右,采用了瑞芯微全国产化芯片RV1126,能够输出2.0TOPS的算力,功耗不高于4W。能够以30Hz帧率跟踪像素2*2的目标,能够识别像素为12*12的目标,且识别率高于85%。而MiNO 17红外机芯重量在20g左右(净重5g(不含镜头)),像素分辨率为640*512,采用9/13/25mm三种定焦设计,支持18中伪彩选择,功耗小于0.75W。空对空无人机锁定跟踪AI模块?目标跟踪厂家电话
USB接口转网络输出的视频跟踪板。青海目标跟踪解决
多目标跟踪是指在连续的图像中,通过目标检测算法识别出每一帧中的目标,并在时间上跟踪它们的位置和状态。但目标会不断发生尺度、形变、遮挡等变化,而且还会有目标出现和消失的情况,再加上视频采集端的相机所处环境可能受到外界影响导致抖动的情况(例如无人机高空检测),就会给多目标跟踪造成一定的困难。由于我们不能控制目标,所以只能从视频采集端维护跟踪的稳定性。因此,成都慧视针对于多目标检测跟踪抖动丢失的优化方法是:1.改进目标检测,使用更加鲁棒的目标检测算法。2.增强特征描述,利用深度学习提取更高级别的语义特征,这些特征对于小范围内的视角变化具有更好的不变性3.改进运动模型,在算法中加入对摄像头运动的估计,通过补偿摄像头运动来减小目标真实运动与预测之间的差距。4.数据关联策略,设计更灵活的数据关联算法,允许更大的距离阈值来匹配候选目标。青海目标跟踪解决
与目标跟踪相关的文章
如何目标跟踪批发商
- 网络目标跟踪 2026-03-10
- 浙江目标跟踪哪里好 2026-03-10
- 耐用目标跟踪批发价格 2026-03-09
- 安徽目标跟踪价格信息 2026-03-09
- 哪些目标跟踪联系方式 2026-03-09
- 安全目标跟踪优势 2026-03-09
- 安徽比较好的目标跟踪 2026-03-09
- 移动目标跟踪好选择 2026-03-09
- 四川目标跟踪技术 2026-03-09
- 什么目标跟踪经验丰富 2026-03-09
- 移动目标跟踪 2026-03-09
- 放心目标跟踪设备 2026-03-09
与目标跟踪相关的产品


与目标跟踪相关的新闻
-
重庆无源目标跟踪 2026-03-06 07:01:34无人机追逐识别可以用在许多领域,如军备、安防。通过专业传感器设备的植入,让摄像头智能化,就可以对无人机进行追踪识别。成都慧视作为一家深耕图像处理领域的企业,在这方面也有着丰富的解决经验。在硬件领域,我们能够定制开发不同接口的图像处理板,如CVBS、SDI、LVDS、DVP、USB、Cameralin...
-
陕西无源目标跟踪 2026-03-04 22:01:52深度学习技术,特别是神经网络,已经在图像和语音跟踪领域取得了不小的进展。这些技术可以应用于物联网设备,实现更加智能化的交互和控制。物联网、人工智能和大数据的融合正在开启一个智能化的新纪元。这种融合不仅推动了技术革新,还为各行各业带来了深刻的变革。随着技术的不断发展,这一融合将推动智能家居、智能城市、...
-
湖南目标跟踪工程 2026-03-03 12:01:41多边形标注能够能够帮助我们标注一些规则复杂的物体,如动物、人、车、建筑物等,与矩形标注框等方法相比,多边形标注更能精确展示被标注物体的形状、大小以及实时形态,通过大量的多边形标注工作,能够更好的帮助我们提高算法模型的准确性和鲁棒性。传统的多边形标注方法中,标注者需要在物体的边缘上依次单击鼠标或使用绘...
-
信息化目标跟踪价格信息 2026-02-28 03:01:56无人机能够通过高空拍摄快速获取大范围、多角度的地面信息。但是传统的摄像头只能获取视频数据,对于许多需要进行数据分析的行业来说显然不够智能化,从无人机视频数据中快速获取提炼大量有价值的信息,不仅能够提升工作效率,还能够减少不小的成本支出。这就是无人机的AI识别能力。通过识别算法,在无人机工作时就对目标...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

内蒙古移动图像处理板
2026-03-09 -
图像处理板欢迎选购
2026-03-09 -

内蒙古信息化图像处理板
2026-03-09 -

移动目标跟踪好选择
2026-03-09 -

四川图像处理板牌子
2026-03-09 -

新疆多系统适配图像处理板
2026-03-09 -

安徽高效目标检测市场报价
2026-03-09 -

四川目标跟踪技术
2026-03-09 -
什么目标跟踪经验丰富
2026-03-09