疲劳驾驶预警的行为监测主要是:通过一系列的技术和方法来监测和评估人体由于长时间活动、缺乏休息或其他原因导致的疲劳状态的行为表现。这些行为表现可能包括但不限于以下几种:眼睛疲劳行为:如频繁眨眼、眼睛闭合时间过长、注视不稳定等。这些行为可以通过眼部监测技术来捕捉和分析。面部疲劳行为:如打哈欠、表情呆滞、面色苍白等。这些行为可以通过面部识别和分析技术来检测。头部和身体疲劳行为:如头部下垂、身体摇晃、坐姿不端正等。这些行为可以通过姿态监测和传感器技术来捕捉。手部疲劳行为:如操作不稳定、反应迟钝、手部颤抖等。这些行为可以通过手部动作监测和分析技术来评估。疲劳行为监测的目的是及时发现人体的疲劳状态,以便采取相应的措施来预F疲劳导致的不良后果。这种监测可以应用于多个领域,如交通运输、工业生产、医L健康、J事和体育训练等,以提高工作效率、B障安全和促进J康。 疲劳驾驶预警系统利用先进的图像处理算法,如图像滤波,边缘检测等,对采集到的图像进行深度分析和处理.安徽客车疲劳驾驶预警系统报价
(下篇)自带算法识别与云端识别的司机疲劳驾驶预警系统各自具有独特的应用区别与优势,以下是对这两者的详细分析:
云端服务器具有强大的计算能力和存储能力,能够处理大量数据并快速做出决策。系统架构:系统包括前端采集设备(如摄像头)、数据传输网络和后端识别服务器等关键组件。前端设备负责数据采集,后端服务器负责数据处理和决策。由于数据存储在云端,多个设备可以共享数据,实现协同工作和数据分析。云端服务器可以方便地更新和升级算法,提升识别精度和适应性。云端服务器具有强大的数据存储能力,可以长期保存驾驶员的驾驶数据。这些数据可以用于后续的数据分析和研究。由于数据存储在云端,系统可以与其他云端服务进行集成,实现跨平台协同工作。例如,可以与车队管理系统、智能驾驶辅助系统等集成,共同提升驾驶安全。通过云端计算资源,系统可以实现高效的算法处理和数据分析。
总结:自带算法识别的系统具有实时性强、稳定性高、成本低和自主性强等特点;而云端识别的系统则具有算法更新方便、数据存储能力强、跨平台协同和资源利用率高等优势。在选择时,用户应根据自身需求和场景特点进行权衡,选择ZUI适合自己的系统方案。 陕西疲劳驾驶预警系统作用司机行为监测预警,安装在车内合适位置,如驾驶员正前方的仪表盘上方,以便准确捕捉驾驶员面部表情和眼部动作.

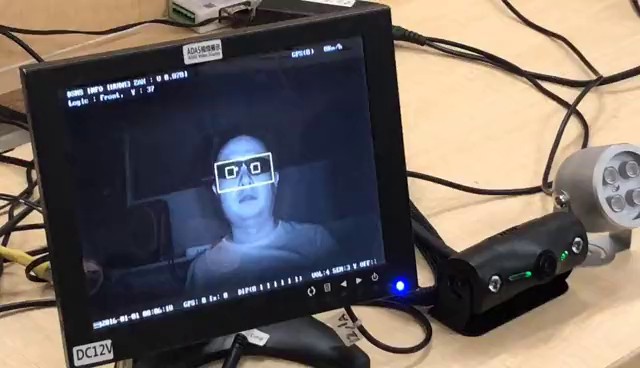
(第3篇)车侣独LI算法的疲劳驾驶预警设备功能简捷实用,预警实时准确,操作简单易用,外形美观灵巧,驾驶员状态监测精度非常高,疲劳驾驶行为、粗心驾驶行为预警准确率高达99%,独CHUANG精细的面部特征锁定分析功能,实时检测眼睛状态变化,预判疲劳状态准确率达95%,独特的图像识别系统,避免外界光源干扰检测效果,确保产品的预警功能全天候巡航监测,独具CVBS视频输出功能,实时显示面部特征区域检测框,便于用户掌握产品监测状态,用户可以根据驾驶习惯调整产品预警灵敏度和音量,提供1-3级可选,增强产品适应不同驾驶环境的能力,独有的GPS车速检测功能,确保车辆在停止状态时关闭所有检测功能,避免干扰驾驶员正常驾驶,丰富的外wei设备联动接口,可连接方向盘振动器、座椅振动器进行多种预警,可连接MDVR平台进行管理。该设备以其卓yue的性能和人性化设计,为驾驶安全提供了有力保障。以下是对其功能的详细阐述:
5,高精度驾驶员状态监测:通过独CHUANG的面部特征锁定分析功能,设备能够实时检测眼睛状态变化,预判疲劳状态的准确率高达95%,确保驾驶安全。
6,全天候巡航监测:独特的图像识别系统有效避免了外界光源对检测效果的干扰,
(下篇)自带算法的疲劳驾驶预警系统是基于机器视觉技术和先进的神经网络人工智能视觉算法开发的驾驶辅助预警产品。以下是对其主要特征及安装应用的详细介绍:
二、安装应用适用范围:该系统适用于多种类型的车辆,包括长途客/货运车、危险品运输车辆、校车、出租车、公交车和家用轿车等。安装位置:通常将体积较小的摄像头安装在驾驶室内驾驶员前方,以便准确捕捉驾驶员的面部特征和动作。应用效果:通过实时监测和预警,有效减少因疲劳驾驶导致的交通事故,保障行车安全。提高管理效率,后台远程监控管理系统能够实时查看车辆和驾驶员状态,便于管理人员进行实时监控和数据分析。降低运营成本,通过减少事故发生率,降低因事故导致的车辆维修和人员医疗费用等成本支出。增强驾驶员安全意识,持续的预警提示和远程监控有助于增强驾驶员的安全意识,促使其自觉遵守安全驾驶规范。
综上所述,自带算法的疲劳驾驶预警系统具有智能识别与分析、全天候工作能力、非接触式测试、多功能预警和远程监控与管理等主要特征。其广FAN的适用范围和明显的应用效果使其成为提高行车安全性和管理效率的重要工具。 怎样查看车侣DSMS疲劳驾驶预警系统后台管理数据?

计算疲劳驾驶预警系统的准确率通常涉及对系统预测结果的评估。准确率是衡量一个分类系统性能的重要指标,它表示系统正确预测的样本数占总样本数的比例。在疲劳驾驶预警系统的上下文中,准确率可以通过以下公式计算:准确率(Accuracy)=TP+TN+FP+FNTP+TN其中:TP(TruePositives):系统正确预测为疲劳驾驶的样本数。TN(TrueNegatives):系统正确预测为非疲劳驾驶的样本数。FP(FalsePositives):系统错误预测为疲劳驾驶的样本数(实际上是非疲劳驾驶)。FN(FalseNegatives):系统错误预测为非疲劳驾驶的样本数(实际上是疲劳驾驶)。要计算准确率,你需要有一个标注好的测试数据集,其中包含每个样本的真实标签(疲劳驾驶或非疲劳驾驶)以及系统的预测标签。然后,你可以通过比较真实标签和预测标签来统计TP、TN、FP和FN的数量,并使用上述公式计算准确率。需要注意的是,准确率并不是评估分类系统性能的w一指标。其他常用的指标还包括查准率(Precision)和查全率(Recall),它们可以提供更全M的性能评估。在疲劳驾驶预警系统中,这些指标的具体定义和计算方法可能会根据具体的应用场景和需求而有所不同。当检测到疲劳驾驶或其他异常事件时,MDVR自动标记并保存相关视频片段.重庆汽车疲劳驾驶预警系统
哪里可以安装车侣DSMS疲劳驾驶预警系统?安徽客车疲劳驾驶预警系统报价
(上篇)自带算法识别与云端识别的司机疲劳驾驶预警系统各自具有独特的应用区别与优势,以下是对这两者的详细分析:
自带算法识别的司机疲劳驾驶预警系统应用区别数据处理与决策:该系统在本地设备上运行算法,对采集到的驾驶员面部特征、眼部信号等进行实时处理和分析,从而判断驾驶员是否疲劳。所有数据处理和决策均在本地完成,不依赖于外部网络。系统架构:系统结构相对紧凑,包括摄像头、传感器、控制器和算法模块等关键组件,易于集成到车载系统中。隐私保护:由于数据处理在本地进行,不涉及数据上传和存储,因此具有更高的隐私保护性能。优势实时性强:由于数据处理在本地完成,系统能够迅速响应并发出预警,有效减少因网络延迟而导致的预警滞后。稳定性高:不依赖于外部网络,系统受网络故障的影响较小,因此具有更高的稳定性。成本低:无需构建和维护复杂的云端基础设施,降低了系统的整体成本。自主性强:系统完全在本地运行,不受外部因素(如网络状态、云端服务器性能等)的干扰,提高了系统的自主性。
云端识别的司机疲劳驾驶预警系统应用区别数据处理与决策:该系统将采集到的驾驶员面部特征等数据上传至云端服务器,由服务器进行算法处理和识别。
安徽客车疲劳驾驶预警系统报价