机器人自动化打磨抛光适用于各种类型工件和材料打磨抛光工艺的各个方面,常规复杂形状工件的抛光需要由人工完成,不仅加工效率低、产品一致性难以保证、生产人员工作环境恶劣,同时管理成本较高,随着用工成本和技工不确定性风险的上市,利用人口红利创造产品利润的时代已经结束。自动化打磨方式使用先进DFC力控制技术使得打磨力控打磨能够处理各种复杂形状的工件,并且保证了工件的加工质量和产品的一致性。通过在机器人上的DFC力控打磨执行器,以及线性链接的DFC力控打磨控制器,结合工件与打磨工具的磨损消耗计算方程,使得系统能够实现复杂磨削,随形抛或安装三维数模尺寸抛都成为可能。实时反馈并控制打磨力在设定范围内,在线质量控制等功能,极大地提高了产品加工效率,并保证了加工工件的质量高度一致性。力控打磨 大儒科技(苏州)有限公司获得众多用户的认可。上海通用力控打磨答疑解惑

气动圆盘工具对圆棒类工件的外表面进行打磨,实际打磨时气动打磨机来回移动,圆棒工件旋转移动,气动打磨机与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要径向的调整位置,专机打磨的刚性接触使得打磨效率低,圆度不一致的缺陷,有待于改善。DFC力控打磨安装在客户现有打磨专机上,保持圆棒匀速旋转通过滚筒线,在原有气动打磨机位置后,安装DFC力控打磨,在力控打磨执行器末端安装原有气动打磨机。按原有直线运动的轨迹实现柔性力控打磨,但是DFC力控打磨的柔性力控制功能使得快速移动的工件收到的打磨力在设定的力值范围内,使得原有的线性接触打磨为面接触打磨,使得不变化圆棒工件安装位置的情况下一次性力控打磨,力控打磨效率高,工件打磨后的圆度一致性好。厦门智能力控打磨打磨大儒科技(苏州)有限公司为您提供力控打磨 ,有需要可以联系我司哦!

因六关节机器人在定位精度、运动耦合方面表现出极大的优势,且工作空间大、工件易于夹持,其在自动化打磨应用中,包括抛光、打磨、去毛刺等方面的应用越来越普遍,但同时也面临许多挑战:1)打磨过程是一个复杂的工艺过程,对其机理的研究还不够深入,使得自由曲面的打磨加工成为模具生产、制造中的薄弱环节和制约模具制造业发展的瓶颈;2)待加工表面复杂多样,需要一种灵活的、适应性强的方式来控制打磨的精度。目前,打磨行业里应用机器人仍主要采用示教的方式,通过离线移动机器人到达目标点,然后通过机器人编程语句逐点记录。其中,为了得到要求的表面加工精度,还需要操作人员在过渡处插补点位以光顺过渡调整机器人的位姿。要完成一个复杂件的打磨作业,需要数天的示教及调试,容易出错,且对操作人员的熟练程度要求很高。
目前,随着社会的发展,越来越多家具和装修需要使用石材,而对于石材表面的平整要求也越来越高,需要对石材表面进行打磨抛光,实现平面光滑整洁,而现有的打磨操作一般需要工人使用打磨工具对石材表面一点点打磨抛光,这种打磨方式耗时耗力,打磨的效率不高,对工人的劳动强度也大,加大了人工成本。针对这些问题,安装了DFC智能力控打磨力控的石板平面自动打磨设备,能够克服解决这些问题。其中动力装置能够为石板打磨提供动力,使打磨机自由移动,转动装置能够使打磨机前后往复移动,实现对石板的前后打磨,研磨装置能够使打磨机向右前进,对石板平面打磨,此设备能够自动完成对石板平面的打磨,无需人工操作,节约了人力成本,也能够减少工作人员的劳动强度,缩短劳动时间,提高了打磨的效率。大儒科技(苏州)有限公司力于提供力控打磨 ,欢迎新老客户来电!

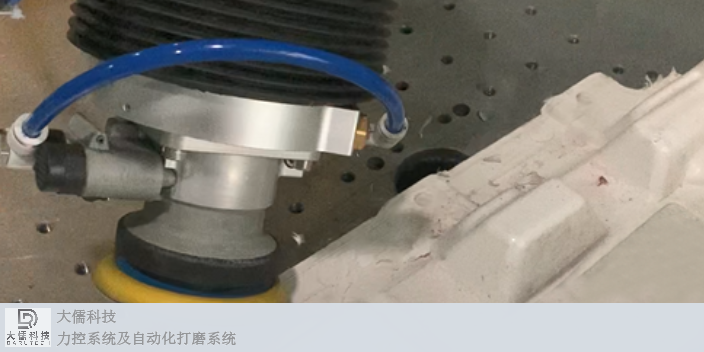
使用DFC智能力控打磨力控打磨来实现批量打磨。在DFC力控打磨执行器末端安装上客户原有的打磨抛光工具即可实现力控打磨的柔性执行。例如在DFC力控打磨末端安装角磨机实现焊缝打磨或者焊渣清理。可以根据需要安装千叶片或着不锈钢碗刷;安装千叶片可以进行焊接飞溅的打磨、表面磕碰划伤的打磨、焊缝余高的磨平及加工余高的打磨等工作;安装不锈钢碗刷可以进行长大焊缝的打磨,主要作用是去除焊接区域的氧化皮。打磨焊缝表面不得有裂纹、焊瘤、烧穿、弧坑沙眼等缺陷。抛光后焊缝不得有表面气孔、夹渣、弧坑、裂纹、电弧擦伤、打火等缺陷。更换抛光机实现的磨抛效果,用布轮把不锈钢产品抛光成有光泽的表面或焊接部位打磨后抛光。抛光前需要把产品表面打砂处理,不能显亚光感觉,抛光后焊接表面不得有气孔、夹渣、弧坑、裂纹、电弧擦伤、打火等缺陷。力控打磨 ,就选大儒科技(苏州)有限公司,让您满意,期待您的光临!浙江购买力控打磨值得推荐
大儒科技(苏州)有限公司是一家专业提供力控打磨 的公司,欢迎新老客户来电!上海通用力控打磨答疑解惑
铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动力控打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制。上海通用力控打磨答疑解惑