
目标检测和跟踪在许多应用中都具有重要的意义,例如智能监控、自动驾驶和人机交互等。传统的目标检测算法需要多次扫描图像,并使用复杂的特征提取和分类器来识别目标。然而,这些方法在实时性和准确性上存在一定的限制。随着YOLO算法的出现,目标检测和跟踪领域取得了重大突破。YOLO算法概述YOLO算法是一种基于...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
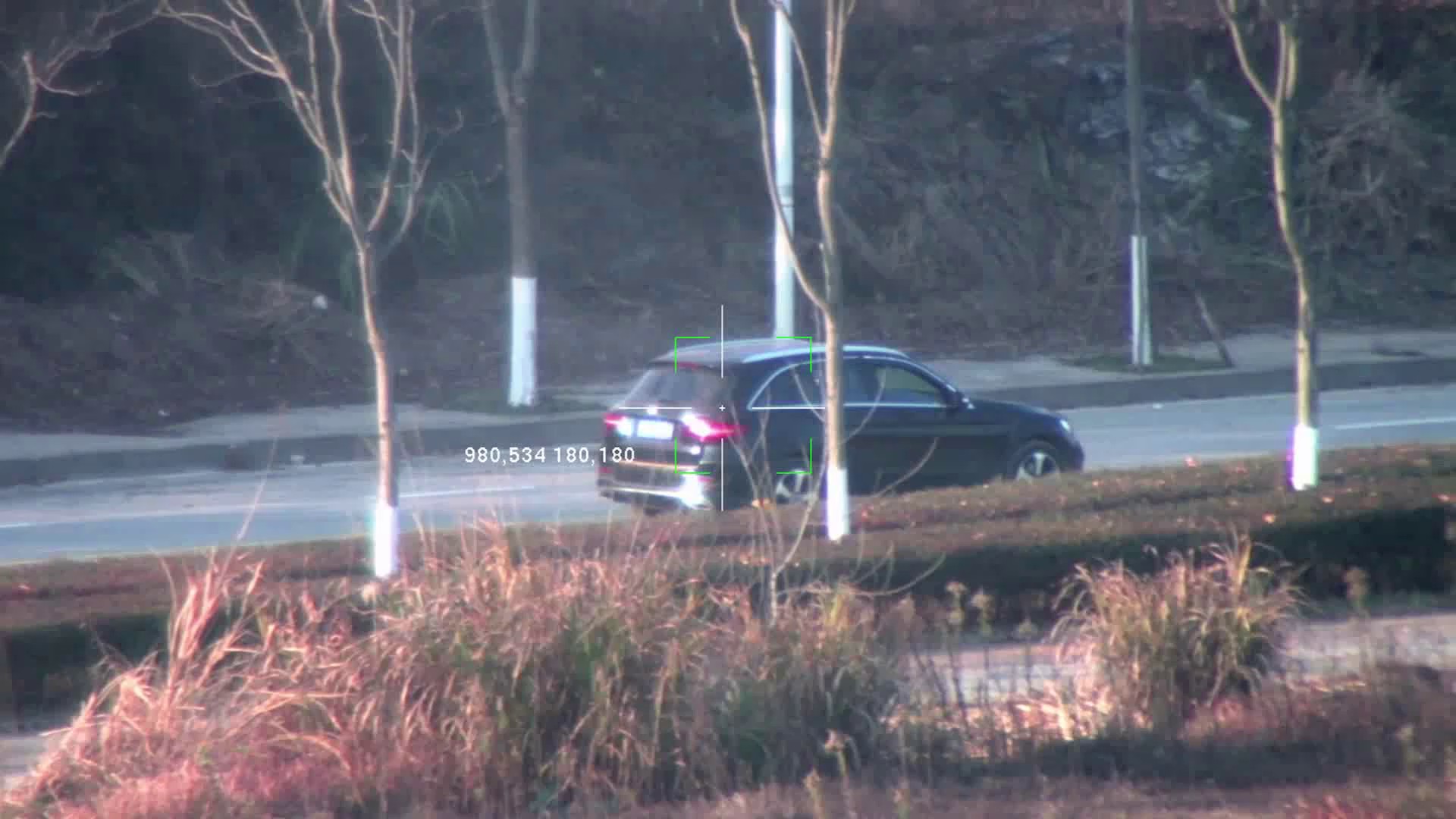
云台的旋转将直接改变摄像机的视野,因此对于云台的控制必须谨慎且准确。错误的控制会使目标从视野中消失,导致跟踪的失败。此外,如果云台的控制幅度过小,可能会达不到目标回到视野中心的目的,目标也同样极易丢失。相反如果在对目标运动速度有可靠估计的前提下,提前将目标移到视野中目标运动方向的另一侧,将为此后跟踪目标赢得更多的时间,能够提高跟踪的成功率。所以为了使对于云台的控制更为合理,应该对于不同的情况采取不同的控制策略。对于情况的划分主要取决于目标的可靠性和速度的稳定性。慧视RK3588图像跟踪板支持目标跟踪识别目标(人、车)。耐用目标跟踪生产企业
目标跟踪
差图像作为经典、常胜不衰的动目标检测方法,有其合理性,因为运动能够导致图像的变化,相邻的两幅或多幅图像之间的关系,或当前图像与背景图像之间的关系,尤其是图像差的关系,能较好地体现出运动所带来的变化。复杂背景下的运动目标检测和跟踪由于有良好的应用前景,成为当前研究的一个热点。图像监控系统的出发点是监控移动的目标,它们或是非法侵入,或是通过关键的场景,总之是移动才带来了对它们实施监控的可能。因此寻找移动的目标是图像监控的关键。高效目标跟踪设备RK3399图像处理板识别概率超过85%。

目标跟踪算法具有不同的分类标准,可根据检测图像序列的性质分为可见光图像跟踪和红外图像跟踪;又可根据运动场景对象分为静止背景目标跟踪和运动背景下的目标跟踪。由于基于区域的目标跟踪算法用的是目标的全局信息,比如灰度、色彩、纹理等。因此当目标未被遮挡时,跟踪精度非常高、跟踪非常稳定,对于跟踪小目标效果很好,可信度高。但是在灰度级的图像上进行匹配和全图搜索,计算量较大,非常费时间,所以在实际应用中实用性不强;其次,算法要求目标不能有太大的遮挡及其形变,否则会导致匹配精度下降,造成运动目标的丢失。
目标跟踪是在首帧中给定待跟踪目标的情况下,对目标进行特征提取,对感兴趣区域进行分析;然后在后续图像中找到相似的特征和感兴趣区域,并对目标在下一帧中的位置进行预测。作为计算机视觉领域的一个热点研究方向,目标跟踪一直都是一项具有挑战性的工作。目标跟踪技术在导弹制导、智能监控系统、视频检索、无人驾驶、人机交互和工业机器人等领域具有重要的作用。从上世纪50年代目标跟踪的起源到现今,尽管已有大量的研究成果,但是在复杂条件下实现实时准确的跟踪依旧难以实现。成都慧视开发的RK3588跟踪板怎么样啊?

随着社区等安防向着智能化的进一步发展,越来越多的领域对传统意义上的视频监控提出了更加的严格要求,虽然传统监控系统已经可以满足人们“眼见为实”的要求,但同时这种监控系统要求监控人员不得不始终看着监视屏幕,获得视频信息,通过人为的理解和判断,才能得到相应的结论,做出相应的决策。因此,让监控人员长期盯着众多的电视监视器成了一项非常繁重的任务。特别在一些监控点较多的情况下,监控人员几乎无法做到完整的监控。目标跟踪图像分析是人工智能的重要组成部分。湖北高性能目标跟踪
如何实现稳定的目标跟踪?耐用目标跟踪生产企业
目标运动估计是根据目标在过去的位置对目标的运动规律加以总结,并以此对目标将来的运动状态进行预测。正确的预测,可以缩小匹配的计算区域,大幅的降低匹配计算量。在视频跟踪系统中由于被跟踪的目标处于运动状态,为了把目标始终保持在摄像机视野之内,必须对摄像机加以控制。在实际应用中,摄像机被固定在云台上,云台本身不做平移运动,但可以控制云台进行水平摆动和上下俯仰,从而带动摄像机做相应运动。所以,对摄像机的控制就是对云台的控制。耐用目标跟踪生产企业
与目标跟踪相关的文章
与目标跟踪相关的产品



与目标跟踪相关的新闻
-
湖南多系统适配目标跟踪 2024-12-19 16:02:55现在城市里面植被丰富,天气干燥时加上不少树林落叶、枯枝和枯草,在室外烧纸、点火或乱扔烟头,就会容易引起火灾。国家明令禁止在公共场所吸烟,因此除了法律的约束,更加便捷的手段应该予以应用来弥补人力监管的不足。在火星识别领域,慧视光电开发的RV1126图像处理板,凭借小巧精悍的性能,优异的识别能力,具有重...
-
安徽网络目标跟踪 2024-12-19 13:03:26跟踪任务与检测任务有着密切的关系。从输入输出的形式上来看,这两个任务是极为相似的。它们均以图片(或者视频帧)作为模型的输入,经过处理后,输出一堆目标物置的矩形框。它们之间比较大的区别体现在对“目标物体”的定义上。对于检测任务来说,目标物体属于预先定义好的某几个类别,如图1左图所示;而对于跟踪任务来说...
-
海南目标跟踪报价行情 2024-12-19 11:03:03在周界安防领域,传统的摄像头有画无声并不具备报警功能。慧视AI图像处理板能够赋能监控进行AI识别,当出现可疑人物有翻越等入侵行为时,监控能够立即锁定跟踪目标人物,并向安保室发出警报,安保室人员能够通过监控的AI跟踪锁定找到可疑人员的移动轨迹,便于纠察。此外,针对于夜间监控的不足,慧视双光吊舱识别装置...
-
质量目标跟踪诚信推荐 2024-12-19 13:03:26视觉跟踪技术是计算机视觉领域(人工智能分支)的一个重要课题,有着重要的研究意义;且在导弹制导、视频监控、机器人视觉导航、人机交互、以及医疗诊断等许多方面有着广泛的应用前景。随着研究人员不断地深入研究,视觉目标跟踪在近十几年里有了突破性的进展,使得视觉跟踪算法不只是局限于传统的机器学习方法,更是结合了...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

企业目标跟踪功能
2024-12-23 -

山东目标跟踪经验丰富
2024-12-23 -

西藏智慧城市AI智能视觉识别
2024-12-23 -

江西图像识别模块专业
2024-12-23 -

辽宁智慧交通AI智能安全帽识别
2024-12-23 -

安徽无源目标识别创意
2024-12-23 -
工业目标跟踪产品
2024-12-23 -

人防目标跟踪功效
2024-12-23 -
网络目标跟踪进货价
2024-12-23