计算疲劳驾驶预警系统的准确率通常涉及对系统预测结果的评估。准确率是衡量一个分类系统性能的重要指标,它表示系统正确预测的样本数占总样本数的比例。在疲劳驾驶预警系统的上下文中,准确率可以通过以下公式计算:准确率(Accuracy)=TP+TN+FP+FNTP+TN其中:TP(TruePositives):系统正确预测为疲劳驾驶的样本数。TN(TrueNegatives):系统正确预测为非疲劳驾驶的样本数。FP(FalsePositives):系统错误预测为疲劳驾驶的样本数(实际上是非疲劳驾驶)。FN(FalseNegatives):系统错误预测为非疲劳驾驶的样本数(实际上是疲劳驾驶)。要计算准确率,你需要有一个标注好的测试数据集,其中包含每个样本的真实标签(疲劳驾驶或非疲劳驾驶)以及系统的预测标签。然后,你可以通过比较真实标签和预测标签来统计TP、TN、FP和FN的数量,并使用上述公式计算准确率。需要注意的是,准确率并不是评估分类系统性能的w一指标。其他常用的指标还包括查准率(Precision)和查全率(Recall),它们可以提供更全M的性能评估。在疲劳驾驶预警系统中,这些指标的具体定义和计算方法可能会根据具体的应用场景和需求而有所不同。车侣DSMS疲劳驾驶预警系统在危险品领域应用效果怎么样?私家车疲劳驾驶预警系统开发平台
在雨天使用车侣DSMS疲劳驾驶预警系统需要注意以下几点:确保系统正常工作:在雨天使用时,需要确保系统的各个部分都正常工作,包括传感器、信号处理电路等。可以检查系统的各个部分是否存在水滴或其他杂质,以免影响系统的正常工作。调整系统参数:在雨天使用时,需要根据实际情况调整系统的参数。例如,在雨天驾驶员容易疲劳,需要适当调低系统的灵敏度,以避免误报或漏报的情况。注意防水措施:如果系统需要与车辆的其他部分进行连接,需要注意防水措施。例如,连接线缆应该采用防水措施,以免水分进入线缆导致短路或故障。注意驾驶员状态:在雨天使用时,需要更加注意驾驶员的状态。例如,驾驶员在雨天容易分心或打瞌睡,需要更加关注驾驶员的疲劳状态,并及时采取相应的措施进行提醒或干预。需要注意的是,不同的疲劳驾驶预警系统在雨天使用的注意事项可能会有所不同,具体使用时可以参考系统的说明书或操作指南。同时,为了确保安全,驾驶员在任何时候都需要保持警觉,谨慎驾驶。 私家车疲劳驾驶预警系统开发平台怎么计算疲劳驾驶预警系统的准确率?

疲劳驾驶预警系统技术经历了多个阶段的发展,从初的基于单一特征的方法,到现在的基于多特征信息融合的方法,以及未来可能的发展趋势。疲劳驾驶预警系统主要依赖于单一的特征,如驾驶员的面部特征和眼部信号等来进行判断。这种方法虽然在一定程度上有效,但准确度并不高,容易受到环境光照、驾驶员个体差异等因素的影响。随着技术的发展,研究者们开始尝试采用基于多特征信息融合的方法。这种方法可以综合利用驾驶员的多种生理特征,如眼部信号、头部姿态、驾驶行为等,以及车辆状态信息,如车速、方向盘转角等,通过信息融合技术,降低了采用单一方法造成的误检和漏检率。目前,疲劳驾驶预警系统市场正处于高速发展的阶段,投资者纷纷加入到这个市场当中,各大车企也纷纷采用这一领域的技术。今年的市场数据表明,疲劳驾驶预警系统市场的销售额已经超过70亿美元,创下历史纪录。同时,政策支持和市场动态促进也是推动疲劳驾驶预警系统发展的重要因素。中国一直在努力加强和完善对疲劳驾驶的监管和预警系统的管控,发布了新的《疲劳驾驶预警系统质量目标》,以及近年来不断发布的有关技术设备的标准,为建立疲劳驾驶技术标准提供了新的和更加严格的要求。
车侣DSMS疲劳驾驶预警系统的计算机算法原理,主要是通过对驾驶员的面部特征、眼部信号、头部运动性等生理特征的监测和分析,以及车辆状态信息的采集和处理,来判断驾驶员是否出现疲劳状态。一般来说,疲劳驾驶预警系统的计算机算法可以分为以下几个步骤:信息采集:通过摄像头等传感器采集驾驶员的面部特征、眼部信号、头部运动性等生理特征,以及车辆的转向盘转角、行驶速度、行驶轨迹等状态信息。数据预处理:对采集到的原始数据进行预处理,包括图像质量、噪声抑制、滤波等操作,以提高数据的质量和准确性。特征提取:从预处理后的数据中提取出与疲劳状态相关的特征,如眼部闭合时间、眨眼频率、头部姿态等。疲劳状态判断:利用提取到的特征,结合计算机视觉技术和机器学习算法,对驾驶员的疲劳状态进行判断。常见的算法包括支持向量机(SVM)、神经网络、决策树等。预警输出:根据判断结果,如果发现驾驶员处于一定程度的疲劳状态,系统就会向预警显示单元发送信号,预警显示单元根据接收到的信息向驾驶员发出预警,以提醒其注意休息或更换驾驶员。除了单独使用计算机视觉技术和机器学习算法外,有时还会将多种算法结合起来使用,以提高预警系统的准确性和可靠性。例如。 车侣DSMS疲劳驾驶预警系统对司机的作用是什么?

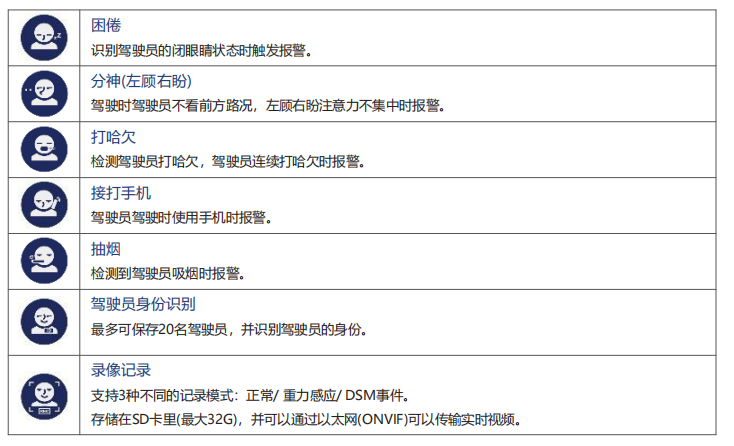
在车侣DSMS疲劳驾驶预警系统中,摄像头的作用主要是采集驾驶员的面部特征、头部和眼部等动作信息,然后进行判断和分析。通过实时监测驾驶员的疲劳状态和其他不良驾驶行为,当侦测到驾驶员的行为将会对驾驶安全不利时,系统就会迅速预警显示,将危险信号传达给驾驶员,以达到及时纠正和避免事故发生的目的。摄像头通过对驾驶员面部特征、头部和眼部等动作的监测,可以判断出驾驶员是否出现疲劳状态。这是因为在疲劳状态下,驾驶员的面部表情和身体动作会发生变化,比如眼睛闭合时间增加、头部低下等。通过对这些信息的捕捉和分析,可以有效地识别出驾驶员的疲劳状态。此外,摄像头还可以用于记录驾驶员的驾驶操作。通过对长途旅行中驾驶员操作的变化进行识别,可以判断出驾驶员是否出现疲劳驾驶。一般来说,驾驶员在疲劳驾驶时,操作频率会变低,转向操作轻微而且急骤。通过对这些行为特征的分析,可以进一步提高预警的准确性。总之,在疲劳驾驶预警系统中,摄像头的作用主要是采集驾驶员的状态信息,并进行判断和分析。通过实时监测驾驶员的疲劳状态和其他不良驾驶行为,系统可以迅速预警显示,将危险信号传达给驾驶员,从而有效地避免事故的发生。 车侣DSMS疲劳驾驶预警系统的功能有哪些?江苏智能司机行为检测预警系统
车侣DSMS疲劳驾驶预警系统怎么升级?私家车疲劳驾驶预警系统开发平台
车侣DSMS疲劳驾驶预警系统集成毫米波雷达的应用效果主要体现在以下几个方面:实时监测驾驶员状态:毫米波雷达可以实时监测驾驶员的眼部状态、头部运动等生理特征,以及驾驶员的行车速度、加速度等指标,从而判断驾驶员是否出现疲劳状态。高精度测量:毫米波雷达具有高精度的测量能力,可以测量物体的距离、速度、轨迹等参数,从而对车辆周围环境进行精确的分析和判断。抗干扰能力强:毫米波雷达具有较好的抗干扰能力,可以在复杂的行车环境中稳定工作,提供准确的数据和信息。探测范围:毫米波雷达的探测范围比较,可以在较大的范围内探测到障碍物和移动物体,从而提供行车安全信息。数据处理和算法支持:毫米波雷达的信号处理和算法支持可以实现数据分析和判断,从而提高疲劳驾驶预警系统的准确性和可靠性。综上所述,疲劳驾驶预警系统集成毫米波雷达的应用效果主要体现在实时监测驾驶员状态、高精度测量、抗干扰能力强、探测范围、数据处理和算法支持等方面,是一种重要的主动安全技术。 私家车疲劳驾驶预警系统开发平台