
- 品牌
- 华心
- 装配方法
- 分组装配法
- 加工贸易形式
- 来料加工
所述组装料筒12的两侧开设有螺杆通道13,所述组装料筒12下端内壁固定设有若干渐变式调节方向块14,所述转盘3上方通过立柱15连接有平台16,所述立柱15的两端通过轴承与所述平台16和所述转盘3相连接,所述平台16周围固定设有所述组装料筒12,所述平台16上设有组装下料机构,所述组装下料机构的一侧设有叠料筒17,所述叠料筒17的一端固定设有连接机构,所述叠料筒17的另一端与所述平台16之间形成下料口18,所述连接机构远离所述叠料筒17的一端均与环形料槽19相连接。所有覆盖件及结构件等表面均应进行表面防腐处理;所有表面颜色须均匀、表面平整。舟山产品自动组装机成品率
组装机
外壳转移升降气缸通过外壳转移升降气缸支撑板设置在外壳转移电缸的移动部上,外壳转移夹爪气缸通过外壳转移升降滑轨设置在外壳转移升降气缸支撑板上,且外壳转移升降气缸的移动部与外壳转移升降滑轨连接。作为推荐,所述的外壳检测组件包括外壳检测支架、外壳检测电机、外壳检测齿轮组、外壳检测轴、检测连接板、检测气缸和检测块;所述的外壳检测支架设置在机架上,且位于外壳转移组件的出料端部,外壳检测电机设置在外壳检测支架的中部,外壳检测电机穿过外壳检测支架的中部与外壳检测齿轮组连接,且外壳检测齿轮组与外壳检测轴连接,外壳检测轴穿过外壳检测支架的顶部。衢州碟刹自动组装机定制非标自动化设备定制步骤: 生产、加工、组装、调试、 验收。
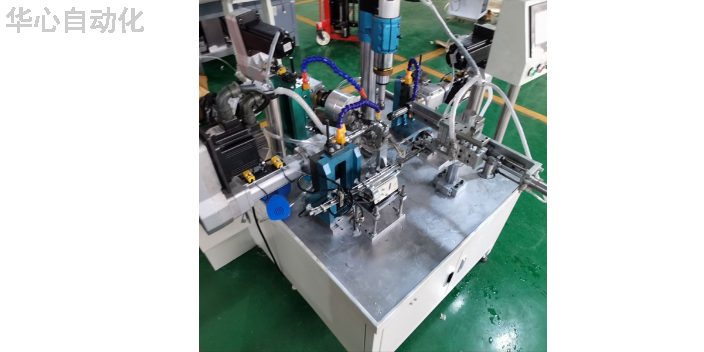
用于容纳拉铆螺母04。实际工作中,拉铆螺母04需要上料时,螺母上料装置可将拉铆螺母04沿圆形转盘的径向朝内送至定位部73a处定位,法兰压片73则可以使在此一定位过程中,有利于拉铆螺母04的摆正。本实用新型中,具体通过驱动机构8来驱动两滑块78相远离,并通过两个第二压缩弹簧70来驱动两滑块78相向运动进而将拉铆螺母04合抱夹紧。其中,第二压缩弹簧70与水平滑轨79平行设置。水平滑轨79的两端各设置有一个弹簧固定座70a。两个第二压缩弹簧70的一端一一对应地固定在两个弹簧固定座70a上,另一端固定在对应一侧的螺母抱持块74上。驱动机构8包括一竖直设置的顶升板83。
另外,在一个实施例中,对于减摩限位机构2来说,所述减摩限位机构2包括安装于底座1上的滑轮20,所述滑轮20与所述转盘3相接触,所述转盘3上位于所述滑轮20的两侧固定设有限位轨道21,所述滑轮20位于所述限位轨道21内。通过设置减摩限位机构2,能够使得转盘3与底座1之间的摩擦力减少,同时能够避免转盘移动位置。另外,在一个实施例中,对于组装下料机构来说,所述组装下料机构包括第三伺服电机22,所述第三伺服电机22的输出端设有电机轴23,所述电机轴23远离所述第三伺服电机22的一端固定设有首先齿轮24,所述首先齿轮24的一侧啮合设有第二齿轮25,所述第二齿轮25的直径小于所述首先齿轮24。智能化----连续送料,定扭矩,可选择提供记数功能,防漏打功能.螺丝滑牙及浮锁检测;

本实用新型涉及拉铆螺丝生产技术领域,具体涉及一种用于拉铆螺丝组装机的拧紧装置。汽车生产过程中,会大量用到拉铆螺杆,其目前均由人工进行装配。人工在将拉铆螺杆、拉铆螺帽组装为拉铆螺丝时,无法准确的控制配合圈数,会造成产品合格率偏低,从而使产品返修。另外,汽车的机械机构复杂多变,因此在装配时,人工作业具有一定的危险性,可能会给员工生命安全带来危险。因此,需要一种能够对拉铆螺丝进行自动组装的拉铆螺丝组装机,进而提高拉铆螺丝组装时的效率和产品稳定性。简单的操作能缩短工作时间,减轻工作人员的工作压力,保障使用安全和设备的安全,是非常重要的优势和特点。丽水设备自动组装机价格
供需双方合作中应尽量做到多沟通,这样才会得到更满意的非标自动化解决方案,生产出适合的非标自动化设备。舟山产品自动组装机成品率
第三驱动装置驱动夹取装置夹取送料装置上的阀体,同时吸头通过真空吸附将中转装置上的阀体吸住,第二驱动装置驱动第二固定板复位,夹取装置将阀体送至中转装置处,吸头将阀体送至载座安装处,首先驱动装置驱动下压装置向下运动,抵住压块,完成阀体的安装,安装完成后,各驱动装置驱动各个模块复位,一个动作周期完成。本实用新型揭示的一种浮动组装机构的工作过程为:待安装载座随坦克链移至吸头下方安装区域,第四驱动装置驱动载座支撑装置向上运动完成载座安装部位的支撑,送料装置将阀体就位。舟山产品自动组装机成品率

自动组装配机是指将产品的若干个零部件通过紧配、卡扣、螺纹连接、粘合、铆合、焊接等方式组合到一起得到符合预定的尺寸精度及功能的成品(半成品)的机械设备。通常由人工处理(接触、整理、抓取、移动、放置、施力等)每一个零部件而实现的装配,严格的讲,只能称为人工装配。不需要由人工处理(接触、整理、抓取、移动、放置等)零部件而完成的装配,可称为自动装配。介于两者之间的为半自动装配。1.零部件定向排列、输送、擒纵系统将杂乱无章的零部件按便于机器自动处理的空间方位自动定向排列,随后顺利输送到后续的擒纵机构,为后续的机械手的抓取做准备。2.抓取-移位-放置机构将由擒纵机构定点定位好的零(部件)抓住或用真空吸住,...
- 宁波螺丝自动组装机厂家 2024-12-28
- 自动组装机多少钱 2024-12-28
- 舟山工业全自动组装机哪家好 2024-12-28
- 金华工业全自动组装机价格 2024-12-28
- 绍兴零件自动组装机 2024-12-28
- 嘉兴碟刹自动组装机报价 2024-12-28
- 湖州设备自动组装机生产厂家 2024-12-27
- 无锡自动组装机多少钱 2024-12-27
- 金华设备自动组装机批发 2024-12-27
- 温州螺丝自动组装机厂家 2024-12-27


- 杭州产品自动组装机哪家好 2024-12-26
- 杭州设备自动组装机成品率 2024-12-25
- 丽水螺丝自动组装机报价 2024-12-25
- 浙江零件自动组装机 2024-12-25
- 江苏后盖自动组装机按需定制 2024-12-25
- 衢州产品自动组装机报价 2024-12-25



- 南通电动攻丝机报价 12-29
- 浙江伺服电动攻丝机批发 12-29
- 江苏全自动攻丝机报价 12-29
- 四川攻丝机批量定制 12-29
- 温州全自动攻丝机批发 12-29
- 南通螺母攻丝机 12-29
- 江苏螺母攻丝机多少钱 12-29
- 徐州攻丝机 12-29
- 徐州多头攻丝机报价 12-29
- 江苏电动攻丝机哪家好 12-28