辨别真假360工程车全景的方法:录像存储稳定-固态存储,系统自检,真正的工程车360全景还要具有合格的行车记录仪功能,这里有重要的一点就是能够有效储存拍摄的画面,市面上大部分用外接U盘存储录像的丢失率高达70%,所以真正的360全景必须自带固态存储,固态存储的稳定性高达99%,这样才能稳妥的保存关键时刻的碰撞录像。360全景将逐渐淘汰普通行车记录仪,1、车身两边侧面的实时图像也要记录;2、引擎盖下方离车近时要看得到;3、开车人需要知道记录是否在工作;4、固态录像存储,录像意外提醒;5、完善的文件管理和全景画面回放。工程车360全景系统可以记录各个部位的实时影像。挖掘机多路360全景影像方案

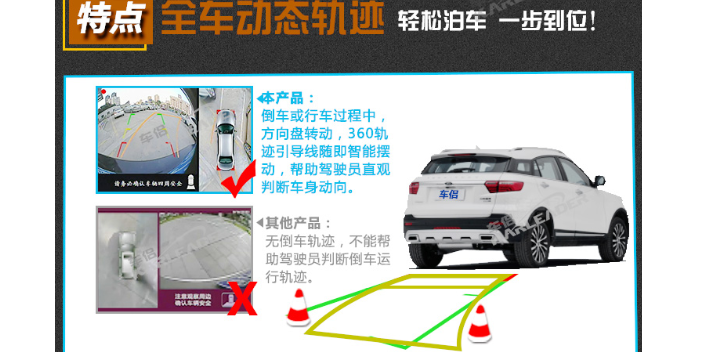
工程车360全景影像系统:3D全屏当车速大于30km/h,处于安全考虑将自动关闭全景影像。在P档进入多媒体桌面的泊车影像图标,进入全景影像模式后,点击屏幕左侧悬浮键,调出360功能菜单。360功能菜单以三色轨迹线标示前后影像内实景距离本车的距离。静态轨迹线四个刻度从近到远分别为0.4m、0.8m、1.5m、3.0m。动态轨迹线,主要用于标记车辆车轮即将行驶至的位置,将随着驾驶员方向盘的转动而变化。倒档进入360全景影像时,如果选择“R档退出5秒延迟”(在车机中设置),360全景影像会在退出R档5秒后自动退出。如果没有选择“R档退出5秒延迟”,360全景影像会在车速高于30km/h时自动退出。铲车6路360全景方案工程车360全景系统通过狭窄路段时能够避免车辆与旁边障碍物发生刮蹭。

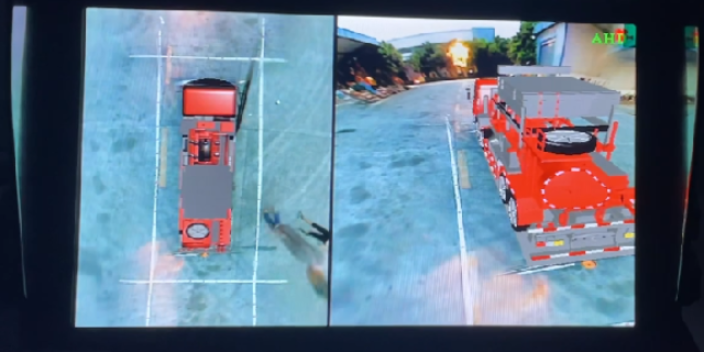
工程车360全景影像系统的工作原理:全景环视系统,它包括有:安装于工程车四周的多个摄像头、图像采集部件、视频合成/处理部件、数字图像处理部件、车载显示器;摄像头分别拍摄工程车前后左右的图像,图像被图像采集部件转换成数字信息送至视频合成/处理部件,视频合成/处理部件处理后的图像经由数字图像处理部件处理后转换成模拟信号输出,在安装于工程车内部的车载显示器上生成工程车及其周边环境的全景图像信息。360全景环视系统:它为工程车驾驶提供更为直观的辅助驾驶图像信息,在工程车辅助驾驶和工程车安全上有着非常好的应用前景。
挑选工程车360全景影像需要考虑:1、价格;2、清晰度;3、主控方案;4、传感器;5、镜头的效果。车用360全景具有高速运算能力,双程序同时运行、低耗能、兼容性强等功能。还具有夜视加强功能、超大广角和六玻镜头的功能。阻挡杂波、提升穿透率和提升锐度都是可以做到的。360全景影像采用宽动态技术,这个技术的好处就是在于背光的时候还是能保持明亮、清晰的视野,不会因为灯光的影响而曝光过度导致视线模糊。四路都是1080P的视频,更全方面更清晰的拍摄记录行车记录,减少视觉盲区。同时还具有全景视图、准确轨迹、行车辅助、循环录像等模式。工程车360全景系统的选购需要考虑人机交互操控的多样性。

工程车360全景影像系统的研发背景:倒车,一直是广大司机头疼的问题,再有经验的司机也有过刮碰经历。很多新手不怕开车,就怕倒车,一倒车就手忙脚乱。虽然有倒车雷达,但车后的小孩、石头、大坑等又不能被倒车雷达识别,极易引起事故。因而,从原来的倒车语音到超声波探头,再到流行的可视倒车雷达,倒车系统一直在发展进步。现如今,单个后视摄像头的可视倒车雷达产品已俨然成为工程车的必备安全装备之一。但同时,基于单个后视摄像头的可视倒车雷达只能看到车身正后方影像,无法同时看清车身四周状况,存在视角盲区,难以满足驾驶员越来越苛刻的驾驶要求,因此就有了车身周围360度全景影像的需求,360度全景倒车影像由此诞生。工程车360全景系统周围物体变形小。江苏多路360全景影像开发商
工程车360全景系统可以帮助工程车驾驶员更为安全的提供驾车辅助。挖掘机多路360全景影像方案
工程车360全景影像系统功能:通过两边的侧视摄像头,轻易判断车身两边的物体与车之间的距离,可以避免擦碰,顺利通过复杂路面,当停车位置前后障碍物位置很低,没有雷达或雷达不能探测时,通过中控台的前后图像就能轻易判断车的前后和障碍物的距离,当车行驶至交叉路口时,可以通过中控台看到前方或后方180度范围图像,从而轻易判断汇车情形,当车直行时,可以直接打开前视的摄像头,如果车子发生偏离直行线路时,驾驶者就可以通过中控台很直接的发现,并进行及时修正。挖掘机多路360全景影像方案
广州精拓电子科技有限公司致力于汽摩及配件,是一家其他型的公司。公司业务涵盖360全景影像,防碰撞预警系统,安全辅助驾驶系统,疲劳驾驶预警系统等,价格合理,品质有保证。公司将不断增强企业重点竞争力,努力学习行业知识,遵守行业规范,植根于汽摩及配件行业的发展。精拓电子凭借创新的产品、专业的服务、众多的成功案例积累起来的声誉和口碑,让企业发展再上新高。