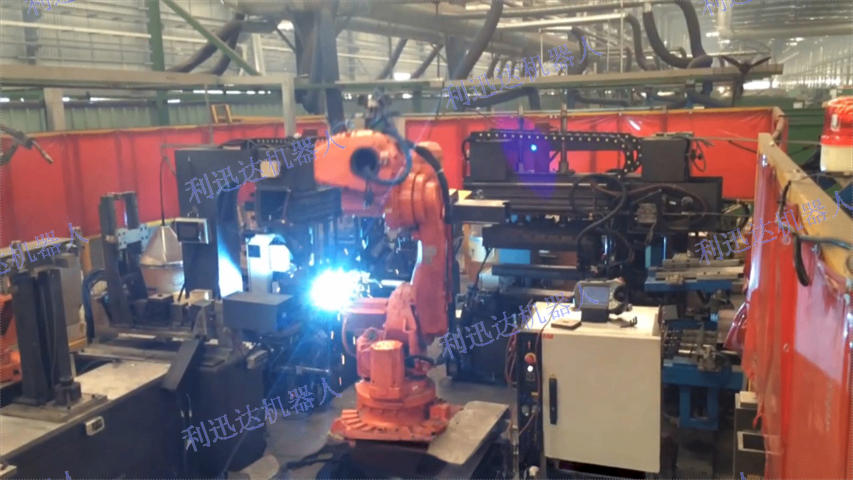
全自动焊接机器人工作站在结构设计上通常强调稳定性与重复精度,这是保证焊接质量长期一致的关键因素。机器人本体安装在高刚性底座或地轨结构上,可有效减少焊接过程中的振动干扰,使焊枪运行轨迹更加平稳。针对焊接工件尺寸较大或焊缝分布复杂的应用场景,工作站往往会配置多轴变位机,实现工件在焊接过程中的自动翻转与角...
全自动焊接机器人工作站基本参数
- 品牌
- ABB,发那科,库卡,新时达
- 型号
- IRB6710
- 电压
- 380
- 产地
- 广东佛山
- 厂家
- 广东利迅达机器人系统股份有限公司
全自动焊接机器人工作站企业商机
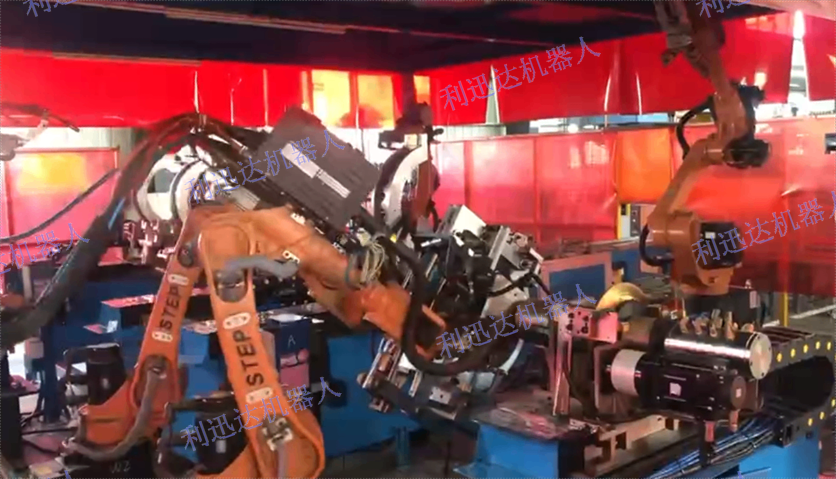
全自动焊接机器人工作站在与其他自动化设备协同运行时,可以形成更加连贯的生产节拍。通过与输送线、周转台或自动上下料装置配合,工件能够按照既定顺序进入焊接工位并完成作业,再自动流转至下一环节。这种连续化作业模式减少了人工搬运带来的等待时间,使焊接设备保持较高利用率。对于节拍要求明确的生产线而言,稳定的焊接周期有助于整体产线节奏的统一,避免局部工序过快或过慢造成的堆积现象。协同运行的实现,使焊接工序真正融入自动化生产体系之中。精细化姿态控制确保复杂空间结构中焊枪角度始终保持合理范围。珠海自动化全自动焊接机器人工作站系列
面向未来制造发展趋势,全自动焊接机器人工作站将继续向更高程度的数字化与集成化方向演进。通过与生产管理系统进行数据对接,焊接任务、设备状态以及生产进度能够实现统一监控,为管理决策提供依据。随着工艺数据库不断完善,企业可以在新产品导入阶段快速调用相似焊接方案,缩短试制周期。焊接工作站在这一过程中不仅承担加工功能,也逐渐成为生产数据的重要来源节点。通过持续优化与升级,自动化焊接体系将具备更强的适应能力,为企业构建稳定、高效且可持续扩展的制造平台提供支撑。阳江一体化全自动焊接机器人工作站生产厂家多工位布局让机器人交替作业,充分释放设备的产能潜力。

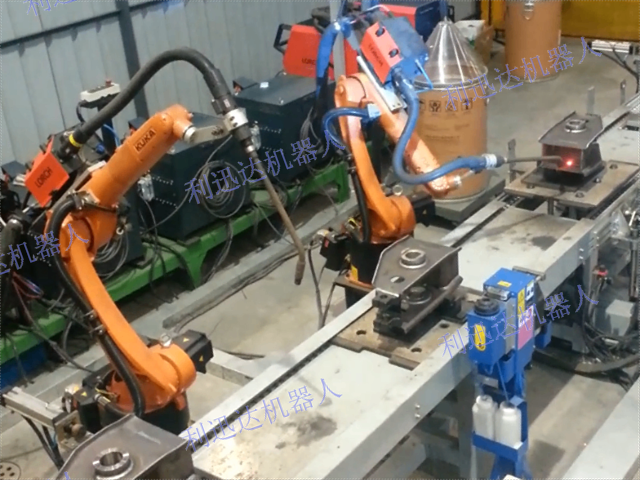
在实际应用中,全自动焊接机器人工作站往往需要结合具体产品结构进行定制化设计。不同工件的焊缝位置、焊接姿态以及装夹方式存在差异,因此在方案阶段会重点评估夹具形式与变位机配置,以确保机器人始终处于合适的焊接角度。通过多轴联动控制,机器人能够完成复杂空间焊缝的连续作业,减少中途停顿带来的焊缝成形不均问题。对于需要多面焊接的工件,变位机可在焊接过程中自动调整角度,使焊缝尽量保持在较优焊接位置,从而提升成形稳定性。这样的系统化设计不仅改善焊缝外观质量,也使整体焊接流程更加连贯,减少重复装夹次数,提高生产组织效率。
在批量化生产场景中,全自动焊接机器人工作站对企业质量管理模式的影响尤为深远。由于焊接过程由程序统一控制,焊缝质量不再依赖个体操作水平,而是由系统稳定性决定。这种转变使企业能够以更客观的方式建立质量评价标准,将焊接质量控制前移至工艺设计和参数设定阶段。在长期运行中,通过对焊接数据的持续积累与分析,企业可以逐步识别影响焊缝质量的关键因素,并进行针对性优化,从而形成具有自身产品特征的焊接工艺体系。与传统依赖经验积累的方式相比,这种基于自动化工作站的质量管理模式更具可持续性,也更有利于新项目快速复制和规模化推广。自动化焊接单元沉淀工艺经验,形成可复用的企业技术资产库。
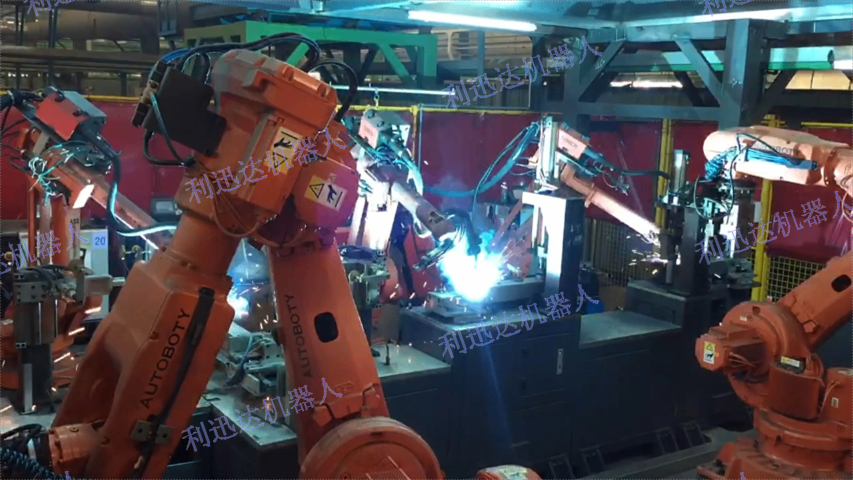
全自动焊接机器人工作站在实际生产中的价值,不仅体现在焊接动作本身的自动化,更体现在其对整体生产流程稳定性的支撑作用。通过将焊接工序集中在标准化工作站内,企业可以对焊接节拍、工艺参数以及设备状态进行统一管理,使焊接过程更加可控。在焊接运行过程中,机器人严格按照预设程序执行动作,焊枪运行轨迹连续且平稳,避免了人工焊接中常见的停顿、偏移或重复修正问题。对于需要长时间连续生产的焊接场景,这种稳定输出能力尤为关键。同时,工作站可根据产品结构对焊接顺序进行优化,使焊接过程由内到外、由主焊缝到辅焊缝有序展开,从而减少焊接变形和应力集中现象。通过系统化规划焊接流程,工作站不仅提升了焊接效率,也为后续装配和检测工序创造了更加稳定的基础条件。快速换型方案支持多品种小批量订单的灵活排产与切换需求。济南直销全自动焊接机器人工作站耗材
工作站采用模块化布局,便于后期扩展与跨车间复制应用场景。珠海自动化全自动焊接机器人工作站系列
全自动焊接机器人工作站在焊接顺序规划上,通常遵循先关键结构、后次要连接的原则,以降低焊接变形对整体尺寸精度的影响。通过合理分配热输入区域,可以避免局部温升过高导致的应力集中问题。对于较长焊缝或闭合结构,常采用分段焊接与对称焊接策略,使热量分布更加均匀。在程序设计中,机器人会按照既定节奏完成多段焊接,并在必要位置设置过渡动作,确保焊缝连接自然。这样的工艺规划不仅有助于提升结构稳定性,也减少后续矫形工序压力,使产品整体质量更加可控。珠海自动化全自动焊接机器人工作站系列
广东利迅达机器人系统股份有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在广东省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同广东利迅达机器人系统股份供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!
与全自动焊接机器人工作站相关的文章
茂名定做全自动焊接机器人工作站产品介绍
- 深圳全自动焊接机器人工作站方案 2026-04-23
- 广东自动化全自动焊接机器人工作站供应商 2026-04-21
- 济南全自动焊接机器人工作站生产厂家 2026-04-20
- 广东全自动焊接机器人工作站生产厂家 2026-04-20
- 广西直销全自动焊接机器人工作站保养 2026-04-20
- 中山自动化全自动焊接机器人工作站售后服务 2026-04-20
- 天津直销全自动焊接机器人工作站供应商 2026-04-19
- 茂名定做全自动焊接机器人工作站降价 2026-04-19
- 柳州全自动焊接机器人工作站维修 2026-04-19
- 柳州工业全自动焊接机器人工作站系列 2026-04-19
- 佛山工业全自动焊接机器人工作站系列 2026-04-18
- 南宁通用全自动焊接机器人工作站降价 2026-04-18
与全自动焊接机器人工作站相关的产品

与全自动焊接机器人工作站相关的新闻
-
钦州自动化全自动焊接机器人工作站保养 2026-04-14 13:10:10从生产管理角度来看,全自动焊接机器人工作站不仅是一套焊接设备,更是企业实现制造流程标准化与数字化的重要节点。通过将焊接参数、生产节拍、设备状态等信息接入上位控制系统,管理人员可以实时掌握焊接过程的运行情况,为工艺优化和质量追溯提供数据支持。在长期运行中,机器人焊接所形成的稳定工艺曲线有助于企业建立标...
-
玉林一体化全自动焊接机器人工作站耗材 2026-04-14 11:10:00从工艺稳定性的角度审视,全自动焊接机器人工作站通过精确的轨迹规划与姿态控制,使焊枪在复杂空间结构中仍能保持合适的焊接角度与熔池形态。针对不同材质与板厚组合,可预设多套参数包并在程序中进行调用,减少现场反复试焊所带来的时间消耗。力控与弧长跟踪技术的引入,使系统在工件存在轻微装配误差时依然能够维持焊缝一...
-
玉林直销全自动焊接机器人工作站生产厂家 2026-04-13 02:09:17全自动焊接机器人工作站在前期规划阶段,通常需要结合产品结构、焊缝分布以及产能目标进行系统化设计,而不是简单地将机器人放置在车间中单独运行。工程人员会根据工件尺寸、重量以及焊接位置,合理确定机器人型号、工作半径以及负载能力,同时规划焊接电源规格与焊枪类型,使设备配置与实际工艺需求相匹配。在工位布局方面...
-
辽宁自动化全自动焊接机器人工作站耗材 2026-04-13 15:10:00全自动焊接机器人工作站在前期规划阶段,通常需要结合产品结构、焊缝分布以及产能目标进行系统化设计,而不是简单地将机器人放置在车间中单独运行。工程人员会根据工件尺寸、重量以及焊接位置,合理确定机器人型号、工作半径以及负载能力,同时规划焊接电源规格与焊枪类型,使设备配置与实际工艺需求相匹配。在工位布局方面...
与全自动焊接机器人工作站相关的问题
新闻资讯
产品推荐
-

玉林自动化智能刀具打磨机器人系统供应商
2026-04-21 -

北海工业智能刀具打磨机器人系统售后服务
2026-04-21 -

清远通用全自动打磨机器人工作站维保
2026-04-21 -

南宁自动化全自动搬运与上下料机器人工作站
2026-04-20 -
济南全自动焊接机器人工作站生产厂家
2026-04-20 -
中山工业智能刀具打磨机器人系统产品介绍
2026-04-20 -

广东一体化全自动打磨机器人工作站设备价钱
2026-04-20 -

广州工业全自动搬运与上下料机器人工作站生产厂家
2026-04-20 -
广东全自动焊接机器人工作站生产厂家
2026-04-20