误区四:刚性匹配忽视动态响应某锂电池叠片机因模组刚性不足产生0.12mm振幅,导致极片对齐失败。选型时需计算系统固有频率:当驱动频率接近模组固有频率的80%时,必须更换更高刚性的型号。建议采用k=3EI/L³公式校核,确保系统刚度值≥50N/μm。多轴联动场景更需整体考量。机器人第七轴案例表明,当X轴模组刚性比Y轴高30%时,会产生17%的轨迹偏差。应通过有限元分析验证多轴刚度匹配,必要时采用加强筋结构或改变支撑跨距。误区五:忽视全生命周期成本某光伏串焊机选型时比较采购成本,未计算维护费用。进口模组5年总成本达28万,而国产模组虽然贵5万采购价,但润滑周期延长3倍,总成本反低9万。建议建立TCO模型,将能耗、保养、备件损耗纳入计算。模块化设计可降低隐性成本。某汽车厂通过选用可快速更换的导轨模组,使产线改造时间从72小时缩短至8小时。选型时应优先考虑具备快拆结构、标准化接口的产品。同样,当注塑机出现故障时,直线模组也会停止动作;滁州直线模组厂家
在自动化设备、机械臂、3D打印等领域,KK模组和直线模组都是常见的线性运动解决方案,但它们的结构、性能和应用场景却有很大不同。苏州尚恩格就带您详细对比一下这两者的区别,帮助你做出更合适的选择!什么是KK模组?KK模组是一种基于滚珠丝杠或皮带传动的线性模组,通常由铝合金型材、导轨、滑块和驱动部件(如步进电机或伺服电机)组成。它的特点是结构紧凑、成本较低,适用于中小型设备的精密传动需求。主要特点:采用滚珠丝杠或同步带驱动,精度较高(丝杠版精度优于皮带版)。负载能力适中,适合轻至中等负载应用。安装灵活,可组合成XYZ多轴系统,常用于3D打印机、小型CNC、自动化检测设备等。山东龙门直线模组联系方式轴向对中度:如果直线模组需要与其他组件或设备进行配合,轴向对中度的标准通常在0.05mm以内。
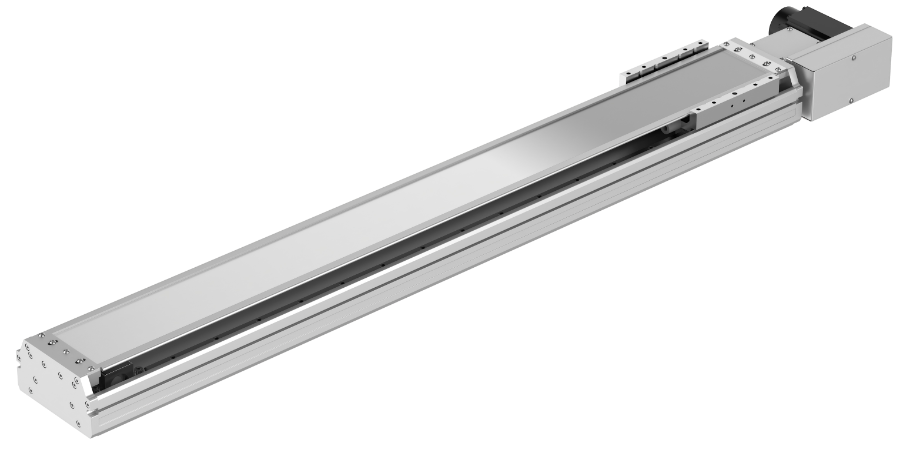
直线电机模组的负载直接关系到滑块在运动时的承载量,因此,选择直线电机模组我们需要了解它的负载能力。直线电机模组负载受多个因素影响,包括安装使用方式、硬件结构、规格,运行状态等各因素共同作用的结果。1.安装方式直线电机模组是水平使用还是垂直使用。如果模组垂直安装,垂直负载还包括重力,所以推力相同的情况下,模组能承载的重量不一样。2.模组规格直线电机模组型材的规格决定了型材本身的承载能力,型材的宽度越大,相对的承载能力就越强,但是如果超载了极限规定值,模组则会变形损坏。3.配套电机的额定功率与直线电机模组配套的伺服电机功率越大,负载越大,反之则越小。4.负载的瞬时速度与加速度移动的瞬时速度越高,负载能力就越小,反之则越大。同理,同一规格的模组滑台的运动加速度越大,负载能力就越小。
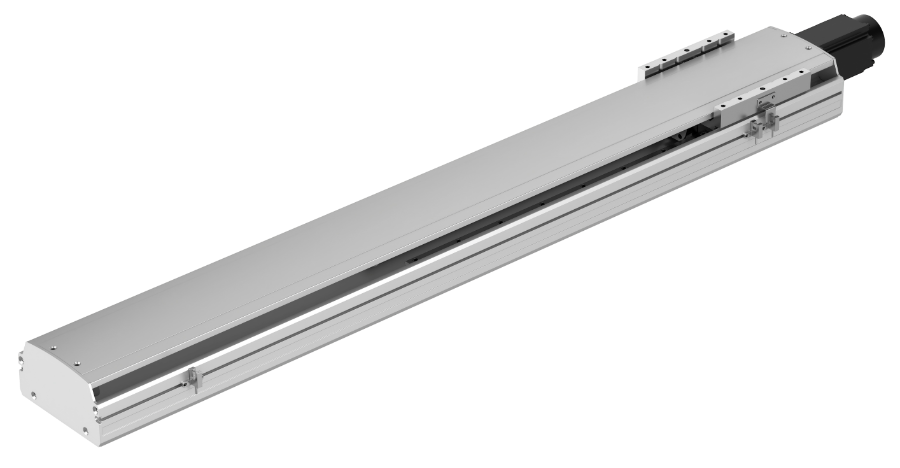
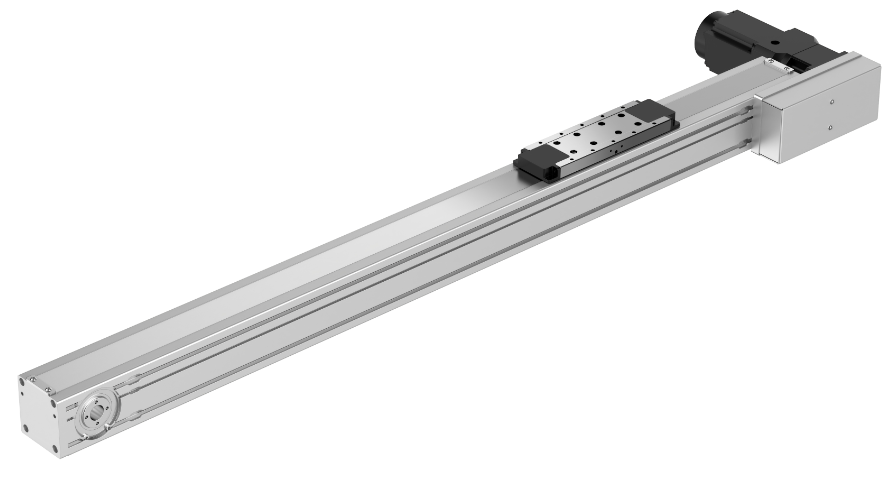
滚珠丝杆式直线模组:高精度的“短途能手”传动方式以丝杆与螺母的旋转配合为主要,通过二者的机械联动带动物体沿丝杆做直线运动。性能特点行程:短板明显,一般不超过1500mm,属于短行程模组。精度:优势突出,定位精度可达±0.005mm及以上,重复定位精度更是能达到±0.003mm的高精度级别。适用场景因极高的精度特性,主要应用于对精度要求严苛的领域,如精密测量(需捕捉微小尺寸差异)、激光加工(需保证激光落点精细)、微电子组装(对细小元器件安装精度要求极高)等。同步带式直线模组通过电机驱动同步带,带动滑块运动。
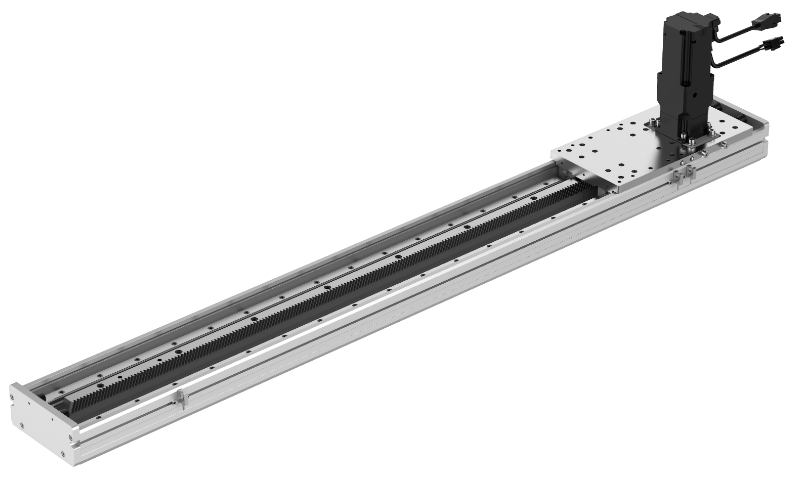
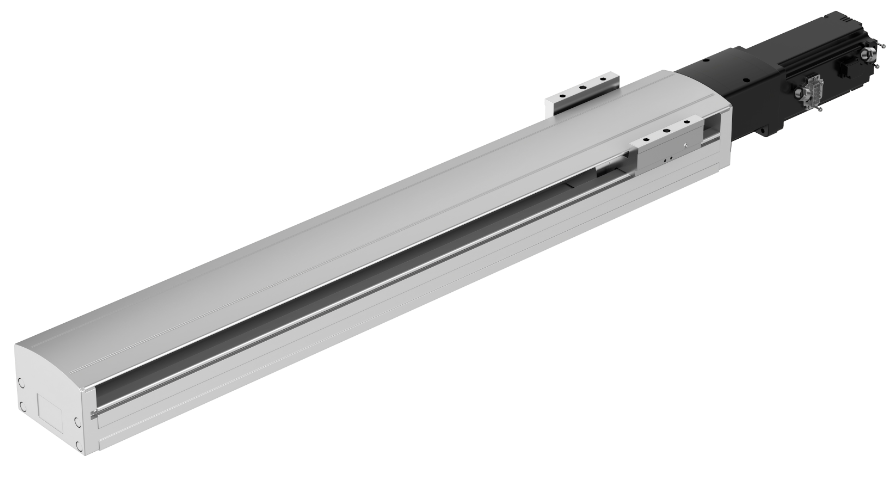
在自动化设备、机械臂、3D打印等领域,KK模组和直线模组都是常见的线性运动解决方案,但它们的结构、性能和应用场景却有很大不同。苏州尚恩格就带您详细对比一下这两者的区别,帮助你做出更合适的选择!什么是直线模组?直线模组是一个更大范围的概念,泛指所有能实现直线运动的模组,包括丝杠模组、皮带模组、齿轮齿条模组,以及高性能的直线电机模组。(1)传统直线模组(丝杠/皮带驱动)这类模组和KK模组类似,但通常结构更稳固、负载能力更强,适用于工业自动化、机床、物流分拣等场景。(2)直线电机模组(选择)直线电机模组采用无接触电磁驱动,直接利用电磁力推动负载运动,没有机械传动部件(如丝杠、皮带),因此具备超高速度、超高精度和长寿命。直线模组的应用已经普及到各个领域,特别是在注塑机行业中,它极大地提高了生产效率和安全性。舟山线性模组生产厂家
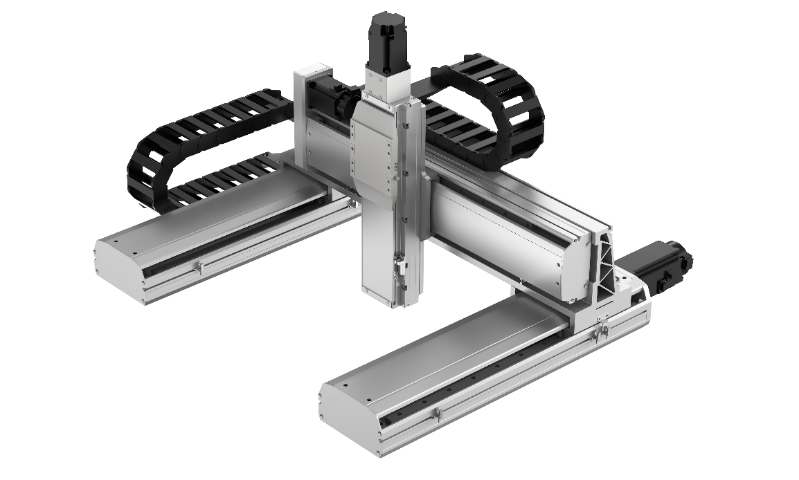
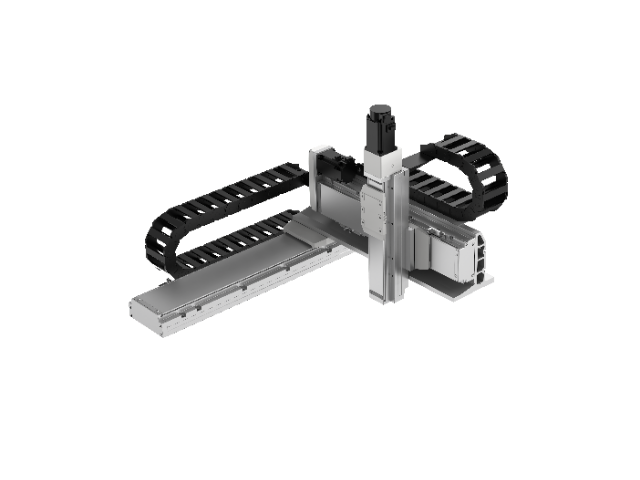
可以通过各个单元的组合实现负载的直线、曲线运动,是轻负载的自动化更加灵活、定位更加准确。滁州直线模组厂家
直线模组定位不准调整技巧首先排查机械结构连接问题。检查模组的滚珠丝杠与电机联轴器是否松动,若存在间隙,需松开联轴器固定螺丝,重新对齐丝杠轴与电机轴(同轴度误差≤0.02mm),再按规定力矩(通常15-20N・m)紧固;查看滑块与工作台的连接螺丝是否拧紧,用扭矩扳手逐颗检查,确保无松动,避免因连接虚位导致定位偏差。其次校准脉冲参数与补偿设置。进入数控系统参数界面,核对电子齿轮比是否与模组导程、电机步距角匹配(计算公式:电子齿轮比=(导程×1000)/(电机步距角×减速比)),若参数错误需重新设定;针对定位累积误差,可通过系统的“定位补偿”功能,在特定位置设置补偿值(如在500mm处偏差0.02mm,补偿+0.02mm),多次测试后将误差控制在0.01mm以内。滁州直线模组厂家
苏州尚恩格科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在江苏省等地区的电工电气行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**苏州尚恩格科技公司供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!