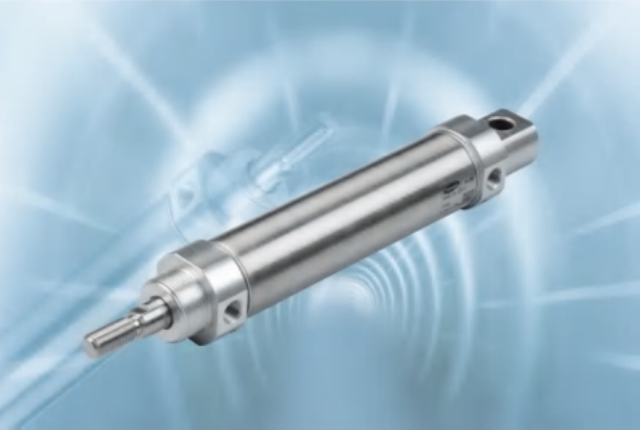
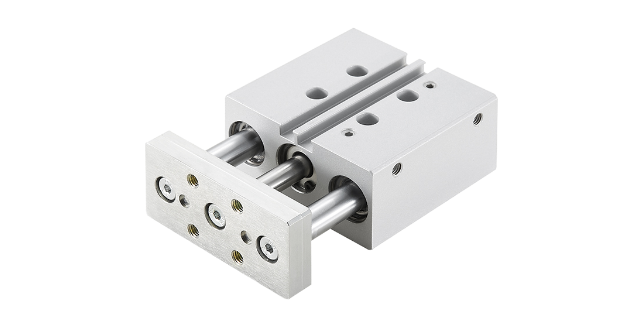
无杆气缸的空间优化方案无杆气缸通过磁耦合或机械密封技术消除活塞杆,显效缩短安装空间。例如,AirTAC 的 HLQ 系列滑台气缸采用循环滚珠导轨,在同等行程下长度较传统气缸减少 40%,特别适合电子设备生产线的窄小工位。磁耦合型无杆气缸因无机械接触,在洁净室环境中表现优异,如医药包装设备中,其防尘等级满足 ISO Class 5 标准。但需注意,磁耦合气缸的负载能力通常低于机械密封型,当轴向负载超过额定值时可能发生脱耦。无杆气缸的空间优化方案无杆气缸通过磁耦合或机械密封技术消除活塞杆,显效缩短安装空间。例如,AirTAC 的 HLQ 系列滑台气缸采用循环滚珠导轨,在同等行程下长度较传统气缸减少 40%,特别适合电子设备生产线的窄小工位。磁耦合型无杆气缸因无机械接触,在洁净室环境中表现优异,如医药包装设备中,其防尘等级满足 ISO Class 5 标准。但需注意,磁耦合气缸的负载能力通常低于机械密封型,当轴向负载超过额定值时可能发生脱耦。薄型气缸在自动化生产线上是不可或缺的一部分。山东气缸的作用

气缸的气路连接方式与管路布置气缸的气路连接需考虑密封性、响应速度和维护便利性,常见的接口类型有内螺纹、外螺纹和快插接头。快插接头可实现气路的快速拆装,广泛应用于需要频繁更换气缸的场景;螺纹连接则适用于高压、振动较大的工况,配合密封胶带或 O 型圈确保气密性。管路布置时应避免过度弯曲或细长管路,减少气路阻力;在多气缸协同工作的系统中,需合理设计分气块的位置,保证各气缸的供气压力均衡。气路管路建议采用铜或不锈钢材质,避免塑料管路老化导致的漏气风险。哪里有气缸选型参数对气源的要求相对较低,易于获取和处理。

气缸在机器人末端执行器中的应用机器人末端执行器(如抓手)多采用气缸作为驱动元件,凭借快速响应和大推力实现工件的抓取与释放。平***爪通过两个活塞的同步运动实现夹取动作,适合抓取规则形状工件;摆动气爪则通过两个手指的相对摆动完成抓取,适应不规则物体。在物流分拣机器人中,气缸驱动的抓手可在 0.2 秒内完成一次开合动作,分拣效率达每小时 800 件以上。为保护易碎工件,部分抓手配备力传感器,通过调节气缸压力实现柔性抓取。
单作用气缸的特性与应用场景单作用气缸以结构简单、成本低廉为特点,其活塞运动由气压驱动,回程依赖内置弹簧或重力。这种设计使其在食品包装机械中尤为常见,例如糖果分拣设备中,单作用气缸通过精细的气压控制实现每分钟千次级的快速分拣动作。值得注意的是,弹簧刚度需与负载匹配,否则可能导致回程滞后。在医疗设备领域,单作用气缸还被用于输液泵的微量进给控制,其低功耗特性符合医疗设备的能效要求。单作用气缸的特性与应用场景单作用气缸以结构简单、成本低廉为特点,其活塞运动由气压驱动,回程依赖内置弹簧或重力。这种设计使其在食品包装机械中尤为常见,例如糖果分拣设备中,单作用气缸通过精细的气压控制实现每分钟千次级的快速分拣动作。值得注意的是,弹簧刚度需与负载匹配,否则可能导致回程滞后。在医疗设备领域,单作用气缸还被用于输液泵的微量进给控制,其低功耗特性符合医疗设备的能效要求。它的动作灵敏,能够及时响应控制信号。

膜片式气缸用弹性膜片(橡胶或金属)代替活塞,膜片在气压作用下变形推动活塞杆运动,分单膜片和多膜片(行程更长)。特点:密封性好(无活塞与缸筒的间隙泄漏),结构紧凑,无润滑也能工作,但输出力小、行程短(通常≤50mm)。应用:低压(≤0.6MPa)、洁净环境(如食品、医药行业的小型夹持、阀门驱动)。3.伸缩式气缸(多节气缸)由多节活塞(或套筒)嵌套组成,伸出时行程长,收缩后长度短(*为最大行程的1/3~1/2)。特点:“长行程+小安装空间”,但推力随伸出节数增加而减小(每节活塞面积递减)。应用:空间受限但需长行程的场景(如垃圾压缩设备、自卸车举升、大型门窗启闭)。紧凑型气缸适用于空间受限的场合。大缸径气缸配套
可在恶劣的气压条件下正常工作,适应性强。山东气缸的作用
薄膜气缸的工作原理与低压应用薄膜气缸以弹性膜片代替活塞,通过膜片的变形传递力,具有结构简单、密封性好的特点。其工作压力通常较低(0.2~0.6MPa),输出力平稳且无摩擦损耗,适合对压力敏感的场合。在纺织机械中,薄膜气缸用于控制纱线张力,避免过大压力导致纱线断裂;在纸张张力控制系统中,其柔和的推力能精确维持纸张的绷紧度。由于膜片的变形量有限,薄膜气缸的行程较短,一般不超过 50mm,多应用于轻负载、短行程的微调机构。山东气缸的作用