- 品牌
- 伊比精密科技有限公司
- 材料材质
- 不锈钢,铁,铝合金,钛合金
- 制品类型
- 医疗配件,汽车配件,3C配件,钟表配件,机器人配件,
- 粉末预处理
- 混合
- 粉末制备方法
- 雾化法
- 成型方法
- 粉末注射成形
- 模具材质
- 钢模
- 模具类型
- 注射模
- 烧结方法
- 高温烧结
- 烧结气氛
- 真空
- 压制方式
- 单向模压
- 后处理
- 机械加工,电镀,热处理,抛光,水镀,研磨
- 烧结温度
- 1360-1380
- 年最大加工能力
- 100000000
- 年剩余加工能力
- 44000000
- 加工贸易形式
- 来图加工,来样加工,OEM加工
- 厂家
- 深圳伊比精密
- 打样周期
- 16天及以上
- 加工周期
- 16天及以上
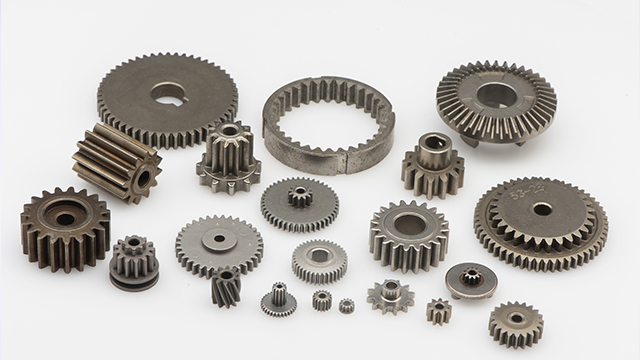
机器人关节减速机构中的齿轮啮合噪音是衡量整机质量的重要指标之一。MIM工艺通过模具成型,能够明显减少单体零件之间的几何偏差。在生产具有小模数特征的行星齿轮时,齿形轮廓的对称性表现较为稳定,这有助于减少因啮合不匀产生的冲击振动。由于MIM工艺可以一次性产出带有减重孔或特定加强筋的复杂齿轮,不仅减轻了转动惯量,还通过结构优化降低了声共振。通过在烧结后辅以少量的精研加工,MIM齿轮副的接触精度可维持在较高水平。这种对一致性的追求,直接优化了机器人在安静环境(如医院或家庭)中的作业表现,提升了交互体验。粘结剂在催化脱脂阶段被逐渐移除,为后续的高温致密化做准备。精密金属注射成型有多少

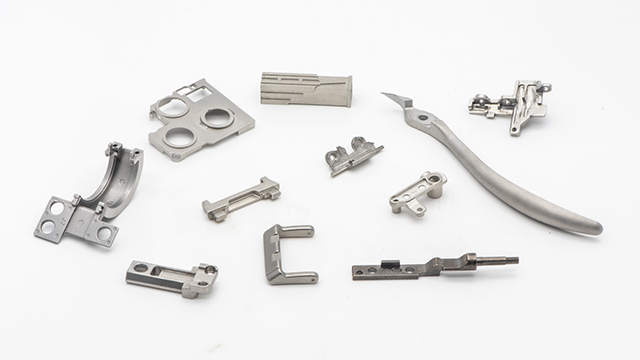
仿生机器人对末端执行器的重量和强度有着双重要求,钛合金因其比强度高和耐腐蚀性好而成为常用选择。然而,钛合金的机加工硬化特性导致其生产效率较低。MIM技术通过在受控的真空环境下对钛粉进行处理,能够实现近净成型,明显减少了昂贵原材料的切削损耗。这种工艺产出的钛合金件不仅具备良好的力学性能,且在复杂曲面成型上具有明显优势,能够适配仿生机器人模拟生物关节的精细结构。烧结后的钛合金零件表面致密,不仅提升了零件的抗疲劳寿命,也为机器人在潮湿或具有化学介质的环境中作业提供了稳定的物理支撑,满足了现代机器人装备的耐候标准。汕尾大型金属注射成型这种先进的工艺流程正在逐步替代部分传统的精密铸造方案。

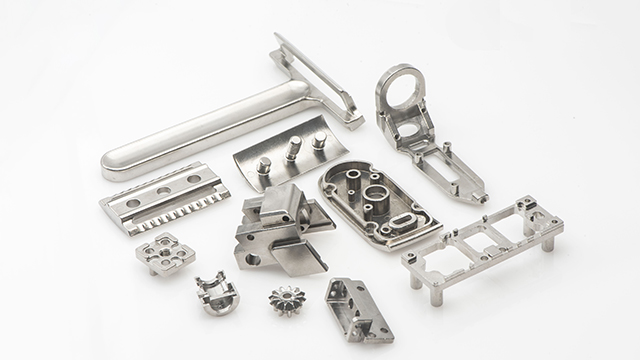
机器人内部集成的各类传感器对安装环境有特定要求,既要结构紧凑,又要具备一定的电磁屏蔽能力。MIM工艺允许设计师在传感器外壳上直接布置复杂的内筋、散热片以及特殊的走线开口,这种一体化成型的能力减少了零件数量和装配层级。选用具备磁导率的材料粉末,可以使外壳在提供机械保护的同时,起到吸收或隔离电磁干扰的作用,提升信号传输的稳定性。这种设计方案不仅优化了机器人内部空间的利用率,还通过减少连接面降低了因松动导致的信号噪音。在复杂的工业电磁环境下,MIM成型的防护组件表现出较好的物理可靠性,是提升机器人环境适应性的有效手段。
MIM零件在从生坯转化为成品的过程中,会经历约15%至20%的线性收缩,这对尺寸精度的控制提出了要求。为了实现稳定的公差输出,工程师需要利用模拟软件对喂料的充模过程和烧结收缩进行精细化建模。通过调整模具型腔的放大倍率,并严格管控粉末装载量的一致性,MIM工艺可以将尺寸公差稳定在合理范围内。对于机器人减速器中精度要求较高的配合面,通常采用“近净成型”策略,即利用MIM成型主要特征,随后保留微量的加工余量进行二次磨削。这种组合工艺既发挥了MIM制造复杂形状的效率,又满足了机器人精密装配对亚微米级公差的需求,实现了生产效率与精度的平衡。这种方式适合制备不锈钢、低合金钢等多种材料的零部件;
工作在核电维护、化工巡检或海上作业环境中的机器人,其金属表面必须具备较强的化学稳定性。MIM成型的不锈钢零件由于其表面微孔率极低,具备较好的钝化处理基础。通过化学或电化学钝化,可以在零件表面形成致密的富铬氧化膜,有效阻断腐蚀介质与金属基体的接触。相比于传统机加工零件,MIM零件在复杂转角和微孔内部的组织均匀性较好,不易产生应力腐蚀开裂。这种对耐候性的深度强化,确保了特种机器人在恶劣介质中长期作业时,关键活动部件不发生锈死或强度退化,明显提升了设备在特殊行业中的服役可靠性和安全系数。此项技术支持生产壁厚较薄且结构错综复杂的微型工业部件。杭州金属注射成型优势
这一技术为工程设计提供了广阔空间,打破了传统加工的局限性!精密金属注射成型有多少
机器人结构设计中经常涉及非规则的曲面和复杂的内腔结构,这些特征如果采用传统的数控切削(CNC)加工,往往会面临刀具干涉和加工死角的问题。MIM工艺利用流体填充模具的原理,有效规避了切削路径的限制。只要模具型腔能够通过合理的分型设计实现脱模,理论上各种复杂的异形件均可一次成型。这种特性允许设计师将原本由多个零件组装而成的机构进行一体化合并。在仿生机器人的骨架设计中,这种零件整合不仅减少了螺栓连接带来的增重,还降低了装配误差对运动精度的影响。通过这种方式,机器人的结构紧凑度得到了优化,为其在受限空间内的灵活作业奠定了基础。精密金属注射成型有多少
深圳市伊比精密科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在广东省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同深圳市伊比精密科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!

仿生机器人(如足式机器人)在运动过程中需要尽量降低四肢的惯性,因此对零件的轻量化有着明确要求。MIM工艺在制造薄壁金属件方面表现出一定的适应性,其壁厚可以稳定在0.5mm至0.8mm之间。通过结合拓扑优化设计的结构,MIM可以产出内部带有加强筋的薄壁骨架。这种结构在维持零件刚性的前提下,减少了金属用量,从而实现了机器人本体的减重。此外,利用MIM制造的轻量化零件在烧结后具有致密的表面层,相比于传统的压铸零件,其抗拉强度和韧度指标更为稳健。这种薄壁化生产能力,为机器人设计师探索更高效的动力比和更敏捷的运动性能提供了工艺保障。针对医疗行业,该工艺常用于生产形状复杂的手术剪刀零件?316金属注射成型...
- 智能家具金属注射成型原理 2026-03-23
- 杭州金属注射成型流程 2026-03-23
- 扬州医疗金属注射成型 2026-03-23
- 茂名钛金属注射成型 2026-03-23
- 钨钢金属注射成型平台 2026-03-23
- 巨型金属注射成型市场价格 2026-03-23
- mim金属注射成型原理 2026-03-23
- 肇庆结构件金属注射成型 2026-03-23
- 浙江304金属注射成型 2026-03-23
- 江门铁金属注射成型 2026-03-23



- 梅州金属注射成型平台 2026-03-22
- 3C金属注射成型平台 2026-03-22
- 北京铝合金金属注射成型 2026-03-22
- 结构件金属注射成型怎么样 2026-03-22
- 北京铁金属注射成型 2026-03-22
- 上海金属注射成型厂家 2026-03-22



- 钨钢金属注射成型平台 03-23
- 巨型金属注射成型市场价格 03-23
- mim金属注射成型原理 03-23
- 肇庆结构件金属注射成型 03-23
- 浙江304金属注射成型 03-23
- 江门铁金属注射成型 03-23
- 江门3C金属注射成型 03-23
- 河北陶瓷金属注射成型 03-23
- 大型金属注射成型流程 03-22
- 湖北国内金属注射成型 03-22