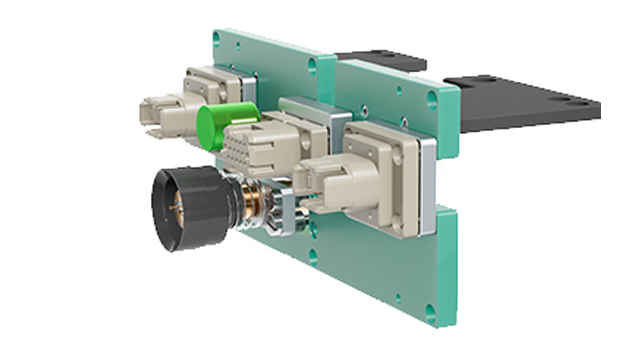
高精度汽车电子测试转接头是实现车载电子系统参数精确测量的基础。其阻抗匹配设计需与被测汽车电子部件的特性阻抗(通常为 50Ω 或 75Ω)保持一致,在 1MHz 至 1GHz 的频率范围内,反射损耗需优于 - 20dB,避免信号反射导致的测量误差。对于自动驾驶系统的毫米波雷达测试,专门的转接头需支持 77GHz 的高频信号传输,插入损耗控制在 0.5dB 以内,确保雷达信号的相位与幅度测量精度。在激光雷达(LiDAR)测试中,转接头的时延误差需小于 1ns,以满足距离测量的高精度要求,为汽车电子传感器的性能验证提供准确的连接通道。汽车电子测试换型频繁?虎连模组快换方案助力产线柔性。广州汽车电子柔性模组
汽车电子测试模组的虚拟测试功能降低了对物理样机的依赖,通过导入 ECU 的仿真模型(FMU 格式),可在虚拟环境中执行大部分功能测试。虚拟测试与实车测试的数据同步技术,实现了虚实测试结果的对比分析,提高测试覆盖率。在产品开发早期,虚拟测试可提前发现设计缺陷,减少后期修改成本;在供应链管理中,可通过虚拟测试验证供应商提供的 ECU 是否满足设计要求,缩短认证周期。虚拟测试与实物测试的结合,形成了从设计到生产的全流程测试验证体系。山东自动化汽车电子柔性模组耐用型汽车电子测试转接头,可承受万次插拔,降低汽车电子测试的耗材成本。
汽车电子测试模组的网络安全测试能力应对车载网络的信息安全威胁,支持 CAN 总线的消息注入攻击测试,验证 ECU 对伪造控制指令的防御能力;以太网测试模块可模拟 DoS 攻击、端口扫描等网络攻击手段,评估车载网络的防护策略。模组能检测 ECU 的固件加密强度,验证安全启动流程的有效性,确保符合 ISO/SAE 21434 网络安全标准。通过预设的攻击脚本库,测试工程师可快速执行标准化的网络安全测试,生成风险评估报告,为汽车电子的安全防护设计提供改进方向。
智能驾驶汽车电子测试模组需具备多传感器仿真能力,其视觉仿真模块可输出 LVDS 格式的虚拟摄像头信号,帧率达 60fps,分辨率支持 1920×1080;雷达仿真模块能生成点云数据,模拟不同距离、速度的目标物;激光雷达仿真则可提供百万点级的 3D 点云,模拟雨、雾等天气对传感器的影响。传感器数据同步精度控制在 1ms 以内,确保多传感器融合算法的测试有效性。通过与场景引擎(如 Prescan)对接,模组可复现海量真实交通场景,从各方面验证自动驾驶系统的感知与决策能力。汽车电子测试转接头的阻抗测试报告,是汽车电子信号完整性测试的依据。
汽车电子测试模组的故障树分析(FTA)功能辅助诊断复杂电子系统的故障原因,通过采集测试过程中的故障现象与相关参数,自动构建故障树模型。汽车电子测试模组基于知识库的推理引擎可快速定位可能的故障源,给出故障概率排序。在 ECU 硬件故障诊断中,该功能还可以分析电源、通信、传感器接口等模块的故障关联性,缩短故障排查时间。汽车电子测试模组的故障树分析结果可生成故障诊断手册,为售后服务提供技术支持,提高车辆电子系统的维修效率。汽车电子测试转接头的三维尺寸精度,直接影响与汽车电子接口的配合度。稳定汽车电子测试解决方案
防静电汽车电子测试转接头,保护汽车电子敏感元件免受静电损害。广州汽车电子柔性模组
自动化测试序列是汽车电子测试模组的核心竞争力,通过脚本化编程实现测试流程的无人值守。主流模组支持 CAPL、Python 等脚本语言,测试工程师可定义信号激励、判定条件与报告生成规则,形成标准化测试用例。模块化的测试序列设计允许复用成熟测试模块,如 CAN 总线通信测试、PWM 信号解析等,新测试项目的开发效率提升 40% 以上。智能执行引擎能根据测试结果动态调整后续步骤,例如当检测到异常信号时自动触发故障诊断流程,收集关键节点数据,大幅缩短问题定位时间。广州汽车电子柔性模组