
- 品牌
- 来拓
- 型号
- LT
石油开采与炼化行业存在诸多安全风险,工控设备通过一系列措施保障其生产过程的安全。在石油开采的钻井平台上,工控设备对钻井过程中的压力、温度、液位等参数进行实时监测和控制。例如,当钻井液的压力出现异常波动时,工控系统会立即调整泥浆泵的工作参数,确保井壁的稳定,防止井喷事故的发生。在石油炼化过程中,DCS对炼油装置中的各种化学反应进行精确控制,严格控制反应温度、压力和物料流量,避免因反应失控导致的炸破或火灾事故。同时,工控设备配备了多重安全联锁装置,如当某个设备出现故障或工艺参数超出安全范围时,安全联锁会自动启动,停止相关设备的运行,并将危险区域隔离。此外,通过网络安全技术,工控设备防止外部网站攻击和恶意篡改数据,保障石油开采与炼化过程中的信息安全,确保人员生命安全和企业财产安全。凭借工控设备,制造业实现智能化升级,迈向工业 4.0 时代。江阴组装工控设备
工控设备
在新能源产业,工控设备扮演着重要角色。以太阳能光伏发电为例,工控设备用于太阳能电池板的跟踪控制、逆变器的运行管理以及整个光伏电站的监控与调度。太阳能电池板跟踪系统中的工控设备,根据太阳的位置变化,精确调整电池板的角度,很大限度地提高太阳能的接收效率。逆变器则在工控设备的控制下,将太阳能电池板产生的直流电转换为交流电,并实现对电能质量的控制和优化。在风力发电领域,工控设备对风力发电机组的转速、桨距角、发电功率等参数进行控制,确保风力发电机组在不同风速条件下稳定、高效地运行。同时,通过对新能源电站的集中监控,工控设备可以实现对多个发电单元的协调管理,提高整个电站的发电效率和可靠性,促进新能源产业的发展。温州西门子工控设备可靠工控设备,在轨道交通信号控制中确保行车安全。
工控设备行业有着严格的标准与规范体系,这些标准和规范旨在确保设备的质量、安全性和互操作性。国际上有IEC(国际电工委员会)等组织制定的一系列工控设备标准,如IEC61131规定了可编程控制器的编程语言和编程环境标准,使不同厂家生产的PLC能够实现一定程度的互操作性。在国内,也有相应的国家标准和行业标准,如GB/T25744规定了工业自动化系统与集成可编程控制器的编程语言等。这些标准涵盖了工控设备的设计、制造、安装、调试、运行、维护等各个环节,企业在生产和使用工控设备时必须严格遵守,以保证设备的合规性和可靠性。同时,标准与规范的不断更新也促使工控设备行业不断创新和发展,提高行业整体水平。
流量控制方面,工控设备通过安装在管道上的流量计实时监测流体的流量,并与预设的流量值进行比较。根据流量偏差,采用流量控制阀,如调节阀或节流阀,通过改变阀门的开度来调节流体的阻力,从而控制流量。例如,在原油输送管道中,当需要增加流量时,工控设备控制调节阀增大开度,减小管道阻力,使原油能够更快地流动。压力控制则通过压力传感器监测管道内的压力变化,当压力偏离设定范围时,工控设备调节泵的转速或启停其他增压或减压设备。例如,在高压液体输送管道中,如果压力过高,工控设备启动减压装置或降低泵的转速,防止管道因压力过大而发生泄漏或破裂;如果压力过低,则启动增压泵或调整泵的工作参数,确保流体能够顺利输送到目的地,保障石油化工管道输送系统的稳定、安全运行。工控设备的远程监控,让企业对生产状况了如指掌实时掌控。

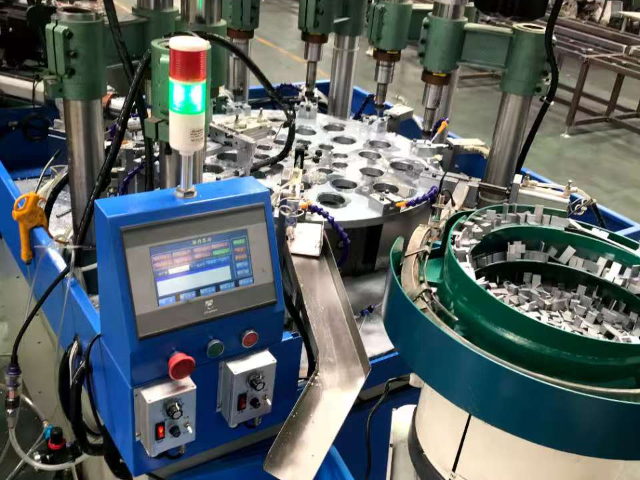
工控设备,即工业控制设备,是工业自动化控制系统中的关键组成部分。它涵盖了可编程逻辑控制器(PLC)、分布式控制系统(DCS)、工业计算机(IPC)、传感器、执行器等多种硬件设备,以及与之配套的控制软件。这些设备协同工作,实现对工业生产过程中的温度、压力、流量、液位等各种物理量的监测与控制,确保工业生产能够高效、稳定、精确地运行。例如在汽车制造车间,PLC控制着机械臂的精确运动,传感器实时监测生产线的各项参数,共同完成汽车零部件的组装任务,极大提高了生产效率和产品质量。耐用工控设备,耐受高温高压,服务于石化工业流程。高新区工控设备有限公司
灵活的工控设备,适应多品种小批量生产模式切换自如。江阴组装工控设备
当前,工控设备呈现出一系列技术创新趋势。一是智能化程度不断提高,设备具备更强的自主学习和决策能力,例如通过人工智能算法对生产数据进行深度分析,自动优化生产工艺。二是网络化进一步深化,工业以太网、5G等通信技术在工控设备中的应用范围更加广,实现设备之间、设备与系统之间的高速、低延迟通信,促进工业互联网的发展。三是微型化与集成化,将更多的功能模块集成到更小的芯片或设备中,减小设备体积,提高设备的集成度和便携性,便于在一些空间有限的应用场景中使用。四是绿色节能技术的应用,采用新型节能材料和节能控制算法,降低设备的能耗和对环境的影响。这些技术创新趋势将推动工控设备行业向更高效率、更智能、更环保的方向发展,为工业生产带来更多的变革和机遇。江阴组装工控设备
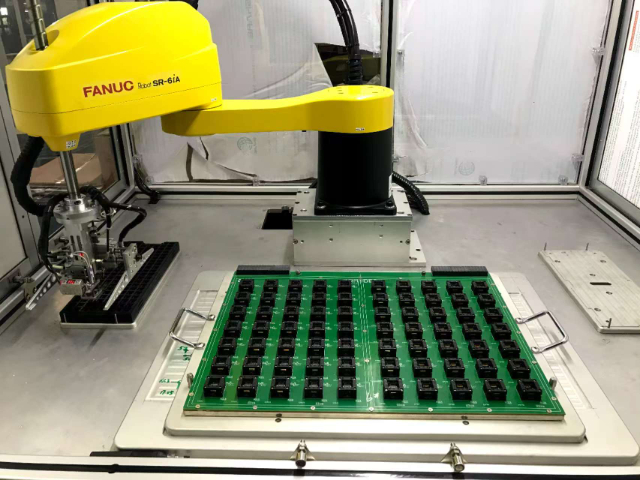
工业机器人在执行任务时,其轨迹规划由工控设备中的特定算法实现。轨迹规划算法的关键是根据机器人的任务要求和工作环境,确定机器人末端执行器在空间中的运动路径和速度。例如,在机器人弧焊任务中,工控设备首先根据焊接工件的形状、焊缝的位置和要求,将焊缝分解为多个离散的路径点。然后,采用插值算法,如直线插值、圆弧插值或样条曲线插值等,在这些路径点之间生成连续平滑的运动轨迹。同时,考虑到机器人的运动学约束,如关节的运动范围、速度限制和加速度限制等,算法会对生成的轨迹进行优化调整,确保机器人能够以合理的姿态和速度沿着轨迹运动,避免出现关节超限或运动不稳定的情况。此外,在轨迹规划过程中,还会考虑到障碍物的避让,...
- 梁溪区汽车零部件工控设备价格 2026-03-19
- 张家港组装工控设备 2026-03-19
- 姑苏区工控设备种类 2026-03-19
- 新吴区工控设备复位 2026-03-19
- 姑苏区逆变器工控设备原理 2026-03-19
- 浙江工控设备电源 2026-03-18
- 青浦区工控设备网 2026-03-18
- 相城区汽车零部件工控设备厂家 2026-03-18
- 武进区工控设备有限公司 2026-03-18
- 江阴新能源电池工控设备价格 2026-03-18


- 虎丘区组装工控设备 2026-03-17
- 锡山区生产线工控设备原理 2026-03-17
- 工业园区工控设备公司 2026-03-17
- 滨湖区组装工控设备交期 2026-02-26
- 姑苏区西门子工控设备 2026-02-26
- 锡山区工控设备保养 2026-02-26



- 姑苏区逆变器工控设备原理 03-19
- 浙江工控设备电源 03-18
- 青浦区工控设备网 03-18
- 相城区汽车零部件工控设备厂家 03-18
- 武进区工控设备有限公司 03-18
- 江阴新能源电池工控设备价格 03-18
- 南京测试工控设备方案 03-18
- 宁波工控设备店 03-17
- 梁溪区工控设备网 03-17
- 青浦区工控设备电源 03-17