.根据权利要求1所述的一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:所述的工作台(1)沿其周边设有框架(1-1),工作台(1)上部的框架(1-1)两侧及后部设有可移动的透明有机玻璃板(1-2),框架(1-1)前部的两立柱上安装有光栅(1-3),工作台(1)下部的框架(1-1)四周设有侧板(1-5),且工作台(1)下部的空腔用于安装控制箱及电气元器件,侧板(1-5)上设有散热器(1-6),工作台(1)前部设有内凹的前储物仓(1-4)和操作面板。3.根据权利要求1所述的一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:所述的固定夹座(5-2)设有用于安装气磨(5-3)或电磨的安装孔,且固定夹座(5-2)的一侧设有与安装孔相通的槽口,固定夹座(5-2)设有贯穿槽口的连接孔,固定夹座(5-2)的安装孔内设有防止气磨(5-3)或电磨旋转的凹槽,气磨。大儒科技(苏州)有限公司为您提供柔性打磨 ,有想法的不要错过哦!南通柔性打磨操作简单
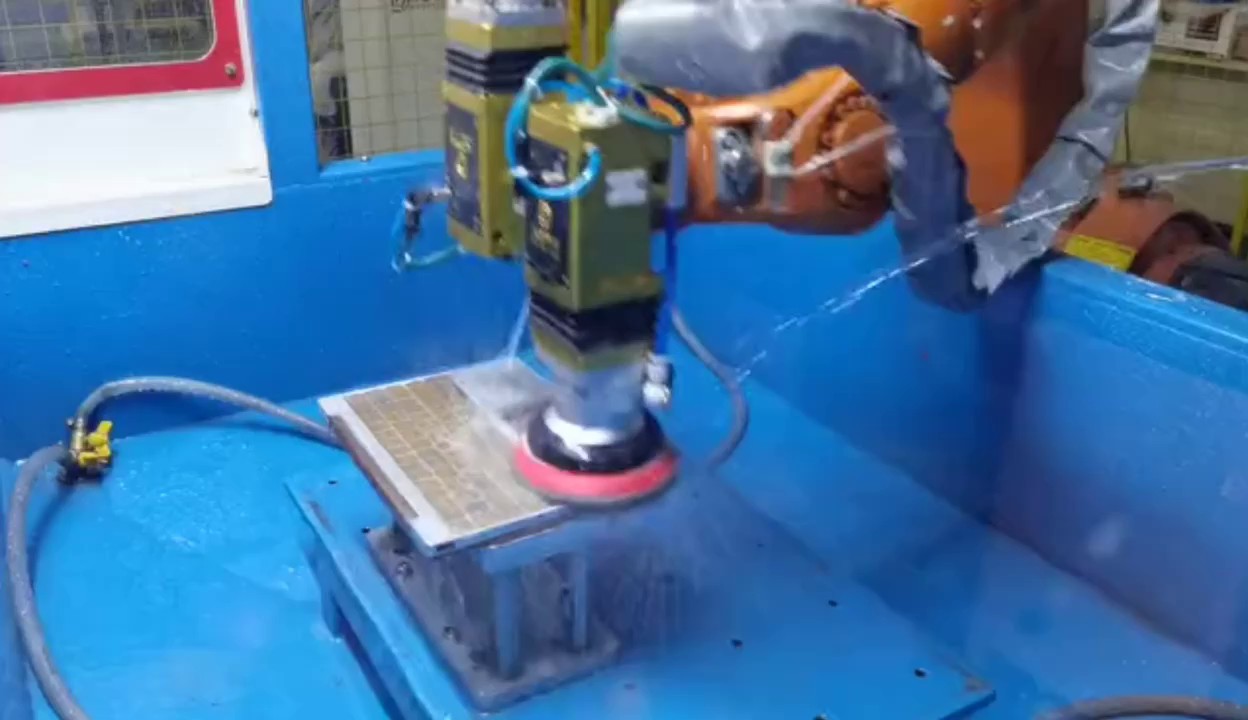
机器人在打磨及抛光领域应用越来越多,安装FDFC柔性打磨实现的柔性打磨工作台。当打磨机器人就位执行设置好的打磨路径,通过DFC柔性打磨控制实时的打磨力,当工件与浮动抛光电机构的接触压力增大时,DFC柔性打磨系统则减少推动力;当接触压力减少时则加大推动力。DFC柔性打磨工作台进一步的提高了打磨质量,通过主动力控结合被动力控的方式,保证工件与磨具之间的压力柔性且可控,提高了生产效率与质量,扩大了打磨工作台的适用范围。通过主动力控结合被动力控的方式,保证工件与磨具之间的压力柔性且可控,提高了生产效率与质量,扩大了打磨工作台的适用范围。本打磨系统通过浮动式抛光电机实现了在打磨过程中工件与磨具之间压力柔性且可控,所以相比于传统抛磨设备,本打磨系统中磨具磨损速度减轻,打磨机器人单次向前步进后,打磨工件数量较传统打磨设备有较大幅度的提高。针对一些表面稍复杂的工件,使磨具可以根据工件表面情况实现浮动,保证工件与磨具间的打磨压力。无锡柔性打磨厂家大儒科技(苏州)有限公司为您提供柔性打磨 ,有想法的可以来电咨询!
焊缝的高差及治具定位公差等原因,使的焊缝打磨变得难以实现自动化打磨。常见的焊缝打磨包括:平面焊缝余高打磨、曲面焊缝余高打磨、不规则焊缝打磨、焊缝打磨后表面抛光等。对于前两种焊缝余高量的去除,通常集成激光测距仪实时反馈、调整打磨工具高度与打磨位置,也能实现柔性打磨加工作业。但对于不规则焊缝打磨和焊缝打磨后的表面抛光,还需要准确识别焊缝、准确定位和测量,对焊缝进行智能柔性的打磨抛光,使用大儒科技的DFC智能柔性打磨柔性打磨通过其柔性力控制,提高一次性打磨效果,确保产品打磨的一致性,实现批量快速的打磨生产。
电气柜是由钢材质加工而成用来保护元器件正常工作的柜子。电气柜制作材料一般分为热轧钢板和冷轧钢板两种。冷轧钢板相对热轧钢板更材质柔软,更适合电气柜的制作。电气柜用途主要用于化工行业,环保行业,电力系统,冶金系统,工业,核电行业,消防安全监控,交通行业等等。在电气柜加工过程中涉及切割、冲孔、抛光和打磨等工艺,传统的抛光方式是操作人员手持抛光机对板材进行抛光,由于人手持抛光机,无法控制一直走直线,导致抛光效果不佳,实用性较低。打磨柔性打磨安装在机器人上,柔性打磨可使抛光面均匀平整,提高抛光质量,提高工作效率。打磨柔性打磨其安装方式、连接方式或设置方式均很简单,客户的技术人员只需按照其附带的使用说明书进行安装和操作即可快速投入打磨生产。柔性打磨 ,就选大儒科技(苏州)有限公司,有需要可以联系我司哦!

非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动柔性打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制。大儒科技(苏州)有限公司是一家专业提供柔性打磨 的公司,欢迎您的来电哦!原装柔性打磨技术指导
大儒科技(苏州)有限公司为您提供柔性打磨 ,有想法可以来我司咨询!南通柔性打磨操作简单
铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动柔性打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制南通柔性打磨操作简单