- 品牌
- surpasshobby,ROCKET-RC
- 型号
- 齐全
- 加工定制
- 是
- 结构型式
- 非电磁式
- 电流类型
- 直流
探究外转子无刷电机的实验原理,我们需要关注其电子换向的具体实现方式。在外转子无刷电机中,电子换向是关键技术之一。它依赖于位置传感器对转子位置的精确检测,以及控制器对定子绕组通电顺序的精确控制。位置传感器通常采用霍尔传感器、电磁式传感器或光电式传感器等,它们能够实时感知转子的位置变化,并将这一信息转化为电信号。控制器接收到这些信号后,通过内部的逻辑处理程序,决定何时何地给哪个定子绕组通电,以确保电机能够持续、平稳地旋转。这一过程涉及到复杂的电路设计和控制算法,是实现外转子无刷电机高效、可靠运转的关键。在实验过程中,我们需要仔细调试这些参数,以确保电机能够达到很好的工作状态。新能源汽车的驱动系统常用外转子无刷电机,助力绿色环保出行。乌鲁木齐精密外转子无刷电机

外转子无刷电机作为一种高效、紧凑的电动装置,在现代工业及消费电子领域得到了普遍应用。其构造特点主要体现在转子和定子的设计上。外转子无刷电机的转子位于定子外侧,由永磁体构成,这种设计使得电机的转动惯量相对较低,从而提高了动态响应速度。永磁体的选用,通常为钕铁硼等高磁能积材料,保证了磁场强度,使得电机在较小的体积内能够产生较大的扭矩输出。而定子部分则集成了绕组与电子换向器,通过精确控制电流的方向和大小,实现了无机械接触换向,减少了摩擦损耗,提升了电机的效率和寿命。外转子结构还使得散热更为容易,因为定子可以直接与外界环境进行热交换,有效避免了电机过热问题,进一步增强了系统的可靠性。沈阳外转子无刷电机结构外转子无刷电机在真空环境下性能稳定,适合半导体设备。

无人机外转子无刷电机在技术创新和材料科学的推动下,正朝着更高效率、更智能的方向发展。随着稀土永磁材料的应用,电机的磁性能得到了明显提升,进一步增强了动力输出和扭矩表现。同时,智能控制算法的引入,使得电机能够根据飞行状态实时调整工作参数,实现更精确的飞行控制。这种智能化的趋势不仅提升了无人机的自主性,还降低了操作难度,使得即便是初学者也能轻松驾驭复杂的飞行任务。针对特定应用场景的定制化设计,如防水、防尘等特性,进一步拓宽了无人机的使用范围,使其在各种恶劣环境下仍能保持稳定运行,展现了无人机外转子无刷电机强大的适应性和应用潜力。
这种设计不仅提高了电机的效率和寿命,还减少了噪音和电磁干扰。在控制方面,无刷电机需要精确控制电流方向才能持续运转,这通常通过六步换向法实现。控制器会检测转子位置(通常通过霍尔信号或反电动势进行),并按顺序给两相通电,形成六种状态。每次切换都会让转子转动60°,从而实现连续旋转。尽管六步换向法可能会带来轻微的扭矩波动,但通过优化控制算法,可以进一步提高电机的运行平稳性和效率。三相外转子无刷电机因其高效率、低噪音和轻量化等优点,在无人机、电动汽车等领域得到了普遍应用。外转子无刷电机在食品加工设备中符合卫生标准。

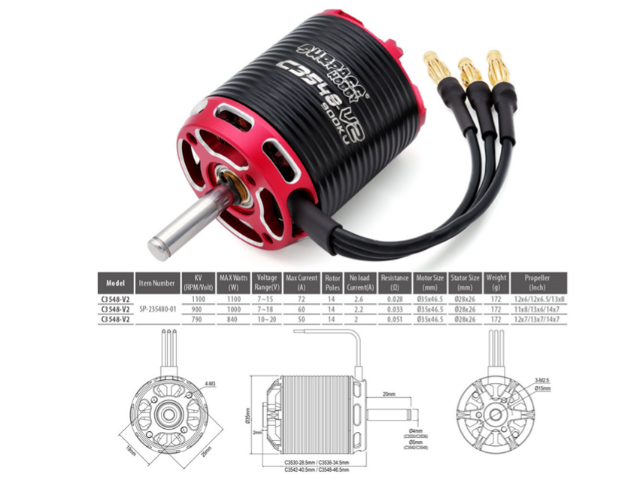
外转子无刷电机作为一种高性能的电动机类型,其规格参数在设计和应用中起着至关重要的作用。以某款外转子无刷电机为例,其规格详尽而精确。该电机采用星形绕组连接方式,霍尔分布角度为120度电角度,确保了电流在定子绕组中的均匀分布,从而提高了电机的运行效率。径向间隙和轴向间隙分别控制在0.02mm和0.14mm以内,保证了转子在高速旋转时的稳定性和精度。较大径向负载和较大轴向负载分别达到20N和10N,这使得电机能够承受较大的外部力而不影响正常运行。该电机的环境温度适用范围为-20°C至+50°C,绝缘等级为Class B,确保了电机在各种环境条件下的可靠性和安全性。在电气性能方面,额定电压为24VDC,额定转矩根据不同型号在50至130mN.m之间,峰值转矩更是高达150至390mN.m,满足了不同应用场景对转矩的需求。同时,电机重量轻盈,便于安装和维护,可根据客户需求进行定制,灵活应用于各种设备中。外转子无刷电机响应速度快,适合机器人关节驱动。南通外转子无刷电机的功能
外转子无刷电机的转矩波动小,运行过程平稳不会产生抖动。乌鲁木齐精密外转子无刷电机
三相外转子无刷电机的工作原理主要基于电子换向和旋转磁场的相互作用。这种电机由定子和转子两大部分组成,其中定子包含三组线圈(U、V、W),排列成星型或三角形,而转子则是由强力磁铁(如钕磁铁NdFeB)制成,其磁极对数会直接影响电机的转速和扭矩。在电机运行时,三相交流电(U、V、W)以120°的相位差轮流通电,使得定子磁场方向不断变化,形成旋转磁场。这一旋转磁场会吸引转子跟随转动,从而实现电机的运行。与外转子结构相关的特点是,磁钢被做成一片片并贴到了外壳上,因此电机运行时是整个外壳在转,而中间的线圈定子保持不动。乌鲁木齐精密外转子无刷电机


- 南京外转子无刷电机的类型 2026-03-08
- 中山国产外转子无刷电机 2026-03-07
- 湖南大扭矩外转子无刷电机 2026-03-07
- 西宁外转子无刷电机调速器生产厂家 2026-03-04
- 重庆外转子无刷电机生产厂家 2026-03-03
- 贵州微型外转子无刷电机厂家 2026-03-01
- 湖南外转子无刷电机结构 2026-03-01
- 合肥无刷外转子无刷电机生产厂家有哪些 2026-02-28