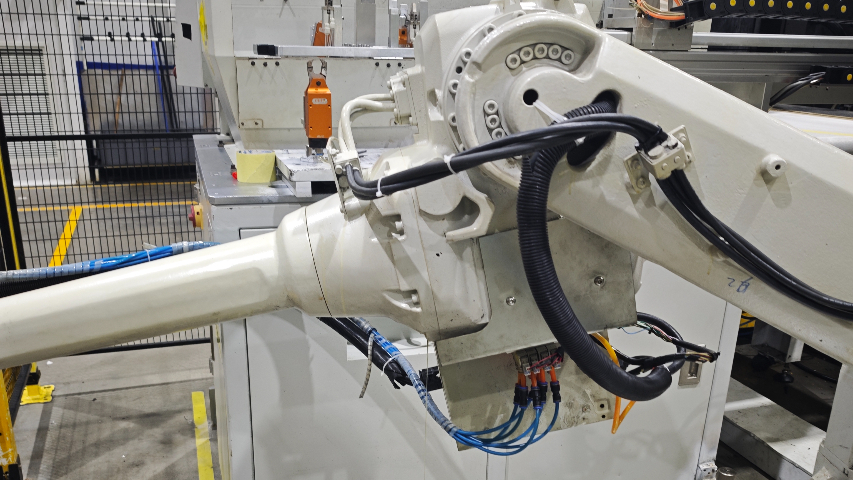
在汽车涂装线的严苛环境中,喷涂机器人面临着多湿度、高化学腐蚀的双重挑战,维持恒压供漆与雾化均匀度成为保证涂装质量的关键。智小杭团队深入研究,建立起动态维护数据库,该数据库能实时监测环境湿度、涂料成分等多维度数据,结合涂料黏度变化曲线, 精确预测齿轮泵的磨损情况,从而动态调整维护周期,避免因过度使用或维护不及时导致的供漆压力波动问题。在齿轮泵维护周期优化后,供漆系统的压力波动范围缩小至 ±0.5Bar,为恒压供漆提供了坚实保障。维保机械臂的视觉系统,可确保图像识别精确,有问题找浙江展杭,调试优化提升性能。舟山ABB2600机器人维修

浙江展杭提供多品牌机器人维护保养升级改造等服务ABB机器人型号:IRB120、IRB140、IRB1410、IRB1600、IRB2600、IRB360、IRB460、IRB4400、IRB4600、IRB52、IRB6620、IRB6640、IRB6650、IRB6660、IRB6700、IRB7600。发那科机器人型号:M-10iA、M-20iA、M-710iC、M-410iC、M-410iB、F-200iB、M410、M200。忧傲机器人型号:UR3、UR3e、UR5、UR5e、UR10、UR10e、UR16e。库卡机器人型号:KR10、KR3、KR16、KR20、KR30、KR60、KR180、GP7、GP8、GP12。安川机器人型号:GP25、GP35、GP50、GP180机、MPX3500、MPX2600、MPX1950、SP系列和AR系列。史努比陶机器人型号:TX200、TX2-160、TX2-140、TX2-90。埃斯顿机器人及其他品牌机器人浙江展杭提供定制技术支持和升级改造方案,帮助您打造智能化生产线。作为可靠的机器人维护与技术伙伴,定制保养计划和定期巡检,确保机器人始终处于稳定状态,提供24小时技术支持,为的生产带来高效稳定提供技术支持。 金华ABB4600机器人维护保养检测机械臂的防护罩完整性,防止因破损失去防护作用,有问题找浙江展杭,及时修复更换。

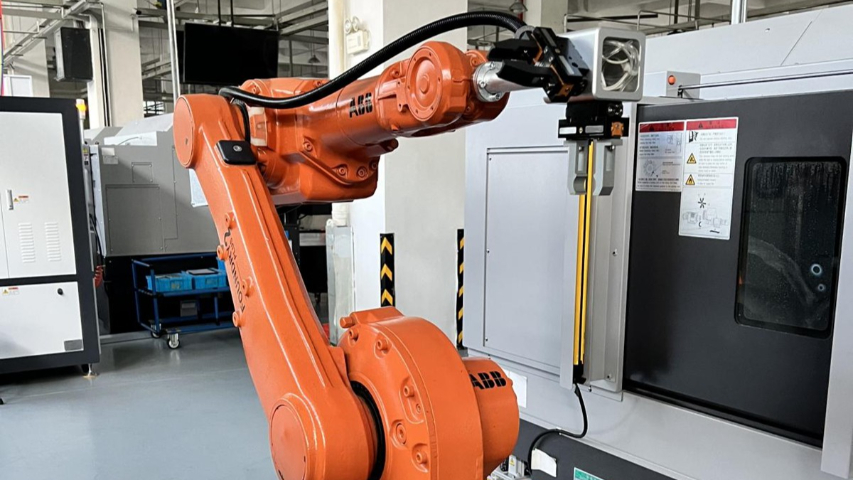
监控确保物料在不同环节间顺畅流转;以及各类传感器,用于实时监测机器人、车床及物料的状态,为整个系统的安全稳定运行提供保障。工作原理物料识别与定位:在料仓处设置先进的视觉识别系统,对放置其中的开关元器件坯料进行精确识别与定位。利用先进的图像算法,快速获取坯料的形状、尺寸及位置信息,并将这些数据传输至机器人控制系统。机器人取料与上料:机器人1600依据视觉系统反馈的信息,规划便捷运动路径,移动至料仓抓取坯料。其末端执行器根据坯料的形状和尺寸,自动调整抓取力度与方式,确保抓取牢固。随后,机器人迅速将坯料运送至机加工车床的装夹位置,精确完成上料操作。车床加工:机加工车床在接收到上料完成信号后,立即启动加工流程。依据预先设定的程序,对坯料进行高精度的切削、钻孔等加工操作,将坯料转化为符合要求的开关元器件成品。机器人下料与卸料:加工完成后,车床发出信号,机器人1600再次动作,准确抓取成品并将其放置到指定的传输轨道或成品料仓。在整个过程中,机器人的动作与车床的加工节奏紧密配合,实现高效、连续的自动上下料作业。项目优势明显提升生产效率:机器人1600的高速运行与精确动作,大幅缩短了上下料时间。
在协作机器人应用中,智小杭实施“人机交互安全强化方案”:通过力觉传感器定期标定(灵敏度±0.1N)、安全接触响应时间优化至50ms,确保人机混线生产时碰撞停机率低于0.01次/千小时。某半导体企业引入双臂机器人后,叠加智小杭定制的“预防性维护套餐”(含关节润滑脂季度更换、电机绕组绝缘检测等服务),芯片封装效率提升40%,实现每小时8000个封装单元的稳定输出,设备故障间隔周期延长至6000小时,人力成本同比降低60%。智小杭还通过远程诊断平台实时监控机器人电流谐波特征,提前48小时预警编码器异常,将非计划停机时间压缩至年均2小时以内。及时更换磨损部件可预防突发故障,避免产线意外停工造成的经济损失。

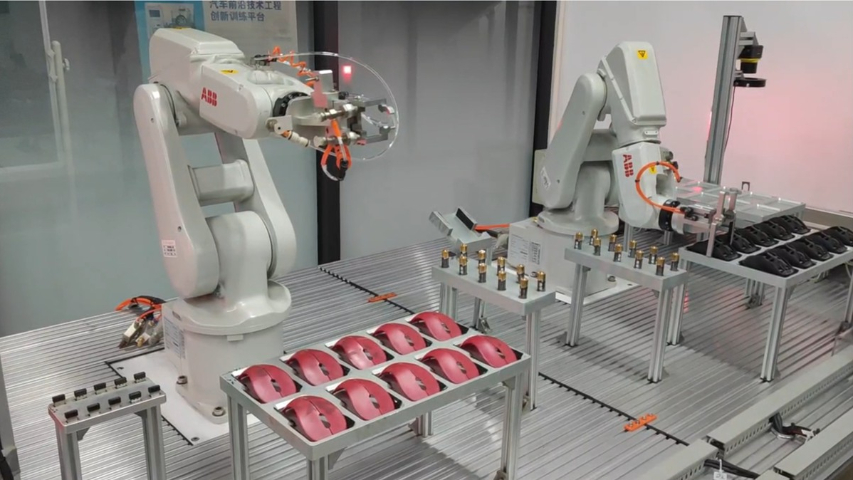
一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台上对工作区域进行了清晰明了的划分,涵盖零部件存放区、组装操作区、成品暂存区等,学生可依照既定流程,有条不紊地开展组装工作。工作原理零部件准备:将鼠标的外壳、电路板、按键、滚轮等各类零部件,依据不同类别,有序放置在实训台的零部件存放区。每个零部件均有专属的固定位置,并配备醒目标识,方便机器人通过内置的视觉识别系统快速捕捉、精确识别,进而实现精确抓取。机器人协作组装:台机器人主要承担抓取鼠标外壳的任务。它借助内置的**视觉识别系统,能够在瞬间精确定位外壳的空间位置与姿态,随后凭借机械手臂,以极高的精度将外壳稳稳放置在组装操作区的**点位。第二台机器人则专注于抓取电路板、按键等内部零部件,依据预设的精密程序,精确调控力度与角度,将这些零部件逐一牢固安装到鼠标外壳内部。两台机器人依托实时通信技术与精妙的协同算法,实现动作的无缝衔接与紧密配合。例如,当***台机器人完成外壳放置动作后,会即刻向第二台机器人发送信号,第二台机器人接收到信号后,迅速启动零部件安装操作,有效规避了相互等待与动作相冲。对机械臂的示教器进行维护,可确保操作灵敏,浙江展杭维修调试,方便操作人员使用。金华ABB4600机器人维护保养
清理机械臂表面油污,防止油污进入内部影响运行,浙江展杭清洁维护,让设备焕然一新。舟山ABB2600机器人维修
项目背景与目标背景:杭州某**积极投身于智能制造教育的前沿探索,精心开展双机协作鼠标组装工作站调试项目。在智能制造浪潮席卷全球的当下,传统制造业向智能化转型的需求日益迫切,社会对掌握**自动化技术的人才求贤若渴。目标:敏锐洞察这一趋势,旨在通过此项目,为学生打造一个集高度仿真性与深度挑战性于一体的实训平台,助力学生在实践操作中深度洞悉自动化生产线的运作机理,熟练掌握多机器人协同作业的关键技术。系统构成机器人重点:项目选用两台型号为120*2的高性能机器人作为主力设备。这两款机器人凭借其出色的机械设计与精密的电子控制系统,展现出非凡的运动性能。其重复定位精度可达±,能够如绣花针般精确地抓取和安置各类鼠标零部件,为组装流程的精确度筑牢根基。灵活多变的关节设计,赋予机器人在狭小局促空间内自由穿梭、灵活作业的能力,轻松驾驭复杂的组装动作。1kg的负载能力,足以承载鼠标组装环节涉及的各类零部件重量,确保运行稳定。定制实训台:专门定制了契合项目需求的实训台。该实训台在设计上深度融合人机工程学原理,经精确测算的高度,充分考虑学生操作时的舒适度,长时间作业也不易产生疲劳感。同时,配备**的光幕传感器。舟山ABB2600机器人维修
锂电池电芯上下料生产线的工业机器人,在高洁净环境下作业,其防尘密封部件和精密传动装置容易受到污染和磨...
【详情】跨越山海,专业护航:浙江展杭服务技术助力中国智造扬帆出海2025年7月8日——近日,浙江展杭技术团...
【详情】机器人在汽车滤清器生产的组装线中可以使用到,组装机器人需要精确安装滤芯、端盖等部件,机械手指和传动皮...
【详情】卫浴陶瓷的釉面喷涂工序,工业机器人 精确控制釉料喷涂厚度与均匀度,直接影响产品的外观质量和市场竞争力...
【详情】浙江展杭已与多家企业签订长期维修与保养合作协议,深受客户信赖。服务理念:秉承“顾客至上,...
【详情】食品饮料的包装生产线上,工业机器人以每分钟 300 瓶的速度完成贴标、装箱作业。考虑到食品行业卫生要...
【详情】塑料管材挤出生产线上,工业机器人负责管材的牵引、切割和堆放,需要与挤出机、模具等设备协同工作。由于塑...
【详情】食品饮料的包装生产线上,工业机器人以每分钟 300 瓶的速度完成贴标、装箱作业。考虑到食品行业卫生要...
【详情】工艺品打磨生产线,机器人需对各类材质的工艺品进行精细打磨,对设备的灵活性和精度要求极高。某工艺品厂的...
【详情】橡胶制品的硫化成型工序,工业机器人在高温高压环境下完成橡胶模具的开合和制品取出,对设备的耐高温、耐磨...
【详情】在汽车零部件冲压生产线上,工业机器人以每分钟120次的高频次作业,快速完成金属板材成型任务。长时间过...
【详情】