玻璃制品上下料生产线的搬运机器人,需要在易碎品的搬运过程中保持极高的稳定性和精度,其真空吸附系统和减震机构至关重要。某玻璃厂的搬运机器人运行 2 年后,出现吸附不牢、振动过大的问题。智小航维护人员对真空吸附系统进行多方面检测,更换磨损的真空吸盘和密封件,对真空泵进行性能测试和维护。对减震机构进行调整和加固,优化机器人的运动参数,降低搬运过程中的振动。经过维护,机器人使用寿命从 4 年延长至 6 年,玻璃破损率降低 80%。定期检测机械臂的制动装置,防止意外滑动造成安全事故,有问题找浙江展杭,消除安全隐患。马鞍山ABB4600机器人售后热线

在汽车涂装线的严苛环境中,喷涂机器人面临着多湿度、高化学腐蚀的双重挑战,维持恒压供漆与雾化均匀度成为保证涂装质量的关键。智小杭团队深入研究,建立起动态维护数据库,该数据库能实时监测环境湿度、涂料成分等多维度数据,结合涂料黏度变化曲线, 精确预测齿轮泵的磨损情况,从而动态调整维护周期,避免因过度使用或维护不及时导致的供漆压力波动问题。在齿轮泵维护周期优化后,供漆系统的压力波动范围缩小至 ±0.5Bar,为恒压供漆提供了坚实保障。绍兴ABB4600机器人保养维护机械臂的控制系统,可防止程序运行异常,浙江展杭专业调试,保障系统稳定可靠。
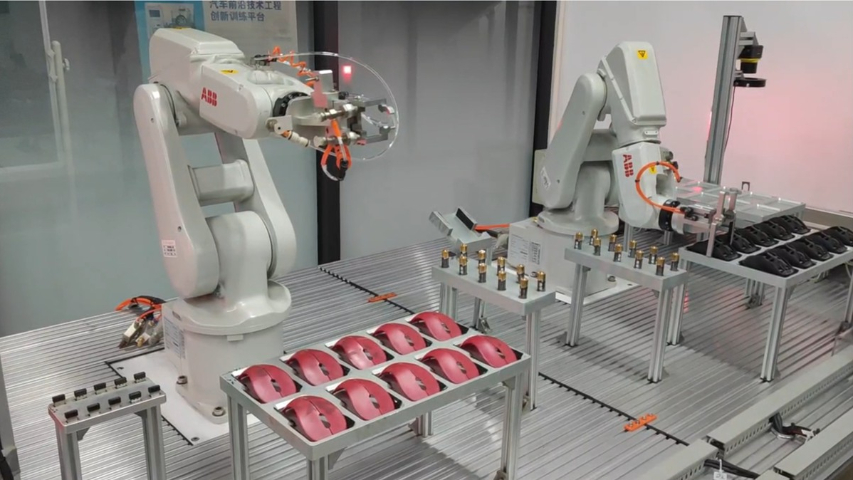
极大提升了组装效率。成品检测与包装:组装完成的鼠标会被移送至成品暂存区,由学生或检测设备进行基础功能检测,包括按键的灵敏程度、滚轮转动的顺畅性等。经检测合格的鼠标随即进入包装环节,至此完成整个组装流程。项目优势教学赋能:为自动化、机器人相关的学生提供了一个高质且难得的实践教学平台。丰富多元的教学内容与创新独特的教学形式,让学生在实践中深度掌握知识与技能,有助于培养出更贴合市场需求的高素质应用型人才,提升学生未来在就业市场的竞争力。科研助力:该项目为深入研究多机器人协作技术、智能制造系统优化等前沿领域提供了宝贵的实验基础与数据支撑。通过对项目实践过程中的技术难题攻克与经验总结,能够推动相关领域的科研工作不断取得新突破,促进学术成果的转化与应用。社会价值:明显提升了**在智能制造教育领域的知晓度与影响力,源源不断地为行业输送素养过硬的人才,为智能制造产业的蓬勃发展注入强劲动力,助力产业升级与创新发展,为社会经济发展贡献教育力量。
卫浴陶瓷的釉面喷涂工序,工业机器人 精确控制釉料喷涂厚度与均匀度,直接影响产品的外观质量和市场竞争力。考虑到陶瓷生产环境潮湿,设备易出现电气元件受潮、喷涂管路堵塞等问题。智小杭售后团队提供多方位维护服务,定期对设备电气系统进行防潮处理,清理喷涂管路,更换老化密封件。例如,某卫浴企业的釉面喷涂机器人因管路堵塞,导致釉面出现流挂、斑点等缺陷。智小杭工程师到达现场后,采用高压清洗设备对管路进行彻底清洗,并对喷头进行疏通和校准,同时对电气控制柜进行除湿处理,更换了受潮的继电器等元件,使设备恢复正常运行。还建立设备健康档案,记录每次维护情况,通过数据分析提前预判设备故障,为企业制定个性化维护方案,保障卫浴陶瓷产品喷涂质量稳定,提高生产效率,帮助企业在市场竞争中脱颖而出。对机械臂的防护涂层进行维护,可防止金属腐蚀,有问题找浙江展杭,延长设备使用寿命。

陶瓷制品上下料生产线的机器人,在搬运过程中需要频繁调整姿态,其关节部位的轴承和传动齿轮易磨损。某陶瓷企业的上下料机器人运行 3 年后,出现关节异响、动作不流畅的情况。智小航维护团队使用超声波探伤仪检测轴承内部损伤,更换磨损的轴承和齿轮。对关节部位进行重新润滑,采用耐磨涂层技术对传动部件进行表面处理。同时,对机器人的控制系统进行升级,优化运动控制算法。经过维护,机器人使用寿命从 5 年延长至 8 年,生产效率提升 25%。清理机械臂表面油污,防止油污进入内部影响运行,浙江展杭清洁维护,让设备焕然一新。黄山ABB52机器人售后电话
检测机械臂的防护罩完整性,防止因破损失去防护作用,有问题找浙江展杭,及时修复更换。马鞍山ABB4600机器人售后热线
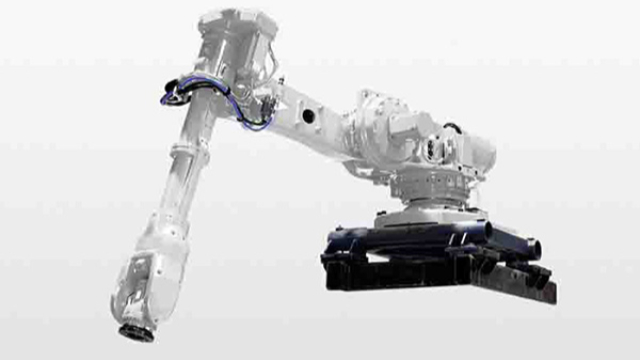
机器人型号:4600配合康耐视3D视觉对小车内的产品进行有序抓取放置到输送线上。工作原理视觉识别:康耐视3D视觉系统首先对小车内的印钞产品进行扫描,获取产品的三维图像数据。然后通过图像处理算法,对图像进行分析和处理,识别出产品的位置、形状、姿态等信息,并将这些信息传输给机器人控制器。路径规划:机器人控制器根据视觉系统提供的产品信息,结合机器人的当前位置和姿态,规划出便捷的抓取路径和动作序列。在规划路径时,会考虑机器人的运动学和动力学约束,以及避免与周围环境和设备发生碰撞等因素。抓取操作:机器人按照规划好的路径和动作序列,运动到产品上方,通过末端执行器(如夹具)对产品进行抓取。在抓取过程中,机器人会根据视觉系统实时反馈的产品位置信息,对抓取动作进行微调,确保抓取的准确性和稳定性。放置输送:机器人抓取产品后,按照预设的路径将产品放置到输送线上。输送线将产品输送到下一个生产环节,完成整个拆垛和输送过程。马鞍山ABB4600机器人售后热线
浙江展杭已与多家企业签订长期维修与保养合作协议,深受客户信赖。服务理念:秉承“顾客至上,...
【详情】食品饮料的包装生产线上,工业机器人以每分钟 300 瓶的速度完成贴标、装箱作业。考虑到食品行业卫生要...
【详情】塑料管材挤出生产线上,工业机器人负责管材的牵引、切割和堆放,需要与挤出机、模具等设备协同工作。由于塑...
【详情】食品饮料的包装生产线上,工业机器人以每分钟 300 瓶的速度完成贴标、装箱作业。考虑到食品行业卫生要...
【详情】工艺品打磨生产线,机器人需对各类材质的工艺品进行精细打磨,对设备的灵活性和精度要求极高。某工艺品厂的...
【详情】橡胶制品的硫化成型工序,工业机器人在高温高压环境下完成橡胶模具的开合和制品取出,对设备的耐高温、耐磨...
【详情】在汽车零部件冲压生产线上,工业机器人以每分钟120次的高频次作业,快速完成金属板材成型任务。长时间过...
【详情】在食品饮料码垛生产线,工业机器人需频繁抓取包装瓶、纸箱等产品,日均完成超 2 万次码垛动作,机械臂关...
【详情】工业机器人作为现代智能制造的机械设备,其工作效率直接影响生产线产能。然而机器人长期高度运行会导致零部...
【详情】工艺品打磨生产线,机器人需对各类材质的工艺品进行精细打磨,对设备的灵活性和精度要求极高。某工艺品厂的...
【详情】注塑机上下料生产线的工业机器人,在高温注塑件的抓取过程中,其耐高温抓取机构和隔热部件容易损坏。某塑料...
【详情】