食品安全关乎人民的身体健康和生命安全,是民生大事。在食品生产与流通的各个环节中,食品检测设备发挥着不可或缺的关键作用,为舌尖上的安全保驾护航。从田间地头的农产品,到生产线上的加工食品,再到超市货架上的各类商品,食品检测设备犹如一位位忠诚的“卫士”,严格把关。在农业生产环节,农药残留快速检测仪能快速、...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
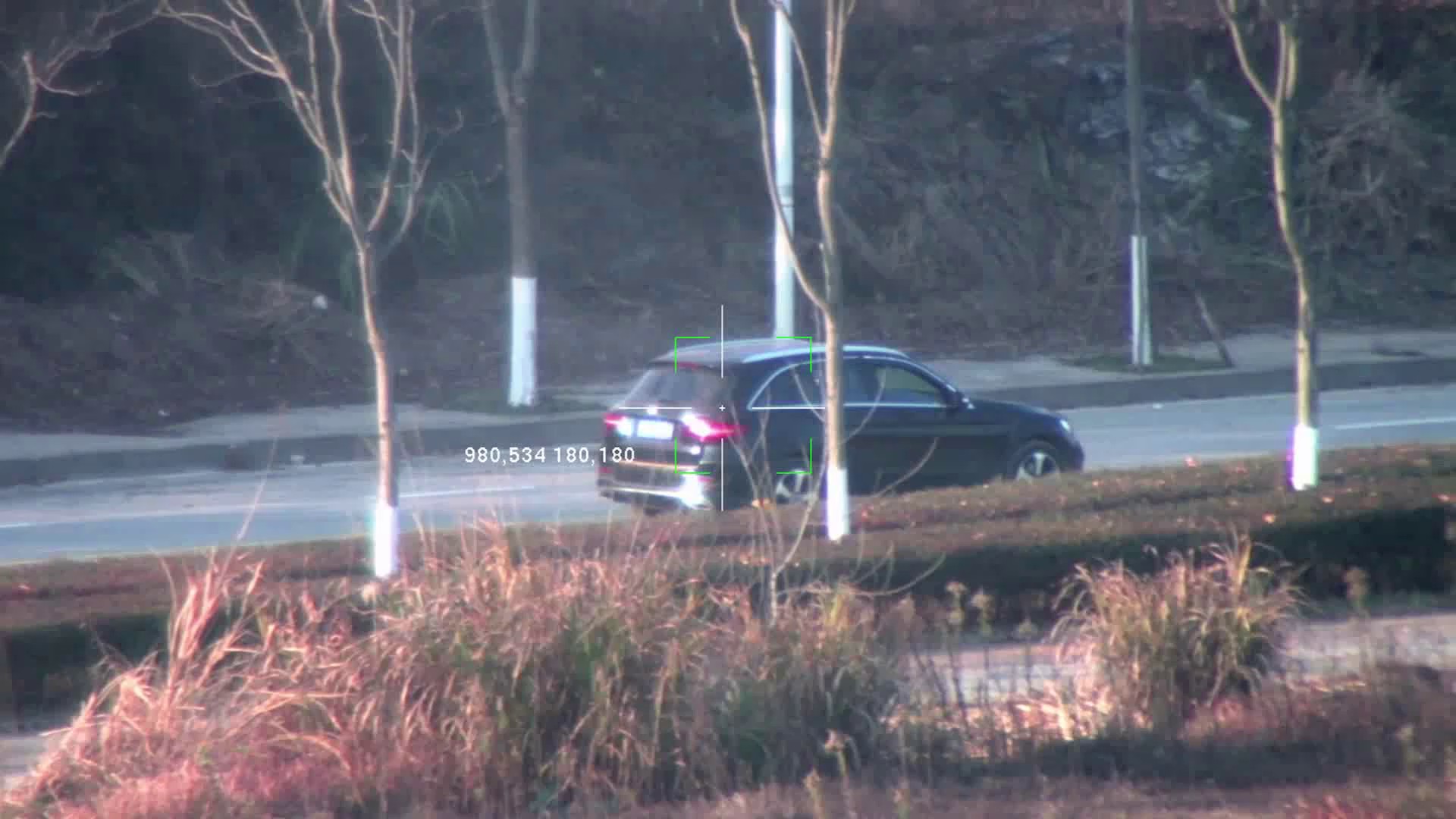
视频自动跟踪系统,一般都是用在露天的、较大地域范围的监控系统中,且边跟踪边录像。在自动跟踪系统的发展上,jun用上的视频自动跟踪、毫米波雷达跟踪以及激光雷达跟踪等是比较成熟的;非jun用领域,存在一些固定画面、摄像机从不运动的的目标检测与跟踪系统;基于带红外线的、常用在演播室或者会议室的、很近距离的跟踪系统,目前主要局限于简单背景(如室内环境下)、大目标(即目标在视频图像中占较大区域),而且一般无法实现控制摄像机转动来对目标进行跟踪。慧视光电开发的慧视AI图像处理板,采用了国产高性能CPU。湖南目标跟踪设备
目标跟踪
无人机能够通过高空拍摄快速获取大范围、多角度的地面信息。但是传统的摄像头只能获取视频数据,对于许多需要进行数据分析的行业来说显然不够智能化,从无人机视频数据中快速获取提炼大量有价值的信息,不仅能够提升工作效率,还能够减少不小的成本支出。这就是无人机的AI识别能力。通过识别算法,在无人机工作时就对目标范围进行AI检测识别,从而提炼所需信息。这就需要对无人机进行智能化改造,可以在传统无人机吊舱中植入成都慧视开发的高性能AI图像处理板,如利用RK3588深度开发而成的Viztra-HE030图像处理板,6.0TOPS的算力能够快速处理无人机识别到的复杂画面信息,这样就有了硬件基础,剩下的就需要对自身算法进行不断优化提升。什么目标跟踪批发商慧视光电开发的慧视RV1126图像处理板,采用了国产高性能CPU。

城市湿地公园是“城市之肺”,是生态建设的重要一环,因此对于湿地公园的日常巡逻必不可少。但是大面积的湿地公园地形复杂交错,许多区域依靠传统的人工巡逻,无法到达。此外,人工巡逻的效率远远不够,无法做到及时响应和精确记录,久而久之,成本就不断累计增加。无人机的落地应用,能够有效减少人工成本的问题。无人机能够凭借小巧的身型,在湿地错综复杂的环境中自由穿梭,确保无死角。利用无人机打造智能巡检系统,通过高清摄像头抵近观察,能够实现湿地全域的高效巡检。其中,智能化的措施在于可以在摄像头的基础上加装图像处理板,通过图像处理板和算法的共同作用,能够让无人机摄像头变成“智慧眼”,这只“智慧眼”能够精细AI识别动物、树木、水中的杂物等等信息,通过大量的数据收集,为管理决策提供依据。
由于侵入的目标的形状和颜色等特征是难以固定的,再加上监控的场景,即背景往往比较复杂,只利用一个单帧图像就找出移动的目标是非常困难的。然而,目标的运动导致了其运动时间内,监控场景图像的连续变化,所以,使用图像序列分析往往是比较有效的,而且适合于低信噪比的情况。由于监控系统通常监控的视野比较大,系统设置的环境较为恶劣,图像传输的距离较远,从而导致图像的信噪比不高,因此采用突出目标的方法,需要在配准的前提下进行多帧能量积累和噪声抑制。在该技术中,要研究的问题有,相邻的两幅或多幅图像之间的关系是什么关系,是简单的图像差的值,还是多幅之间差的最大值,还是其他的与图像减法之间的其他函数关系,是尤其需要研究的。在研究中,研究如何差,如何自动得到差图像的分割门限,如何减小背景和突出目标是研究的方向。慧视RV1126图像跟踪板支持目标跟踪识别目标(人、车)。

视觉目标跟踪是指对图像序列中的运动目标进行检测、提取、识别和跟踪,获得运动目标的运动参数,如位置、速度、加速度和运动轨迹等,从而进行下一步的处理与分析,实现对运动目标的行为理解,以完成更高一级的检测任务。根据跟踪目标的数量可以将跟踪算法分为单目标跟踪与多目标跟踪。相比单目标跟踪而言,多目标跟踪问题更加复杂和困难。多目标跟踪问题需要考虑视频序列中多个单独目标的位置、大小等数据,多个目标各自外观的变化、不同的运动方式、动态光照的影响以及多个目标之间相互遮挡、合并与分离等情况均是多目标跟踪问题中的难点。工程师以RK3588核心板为基础进行定制开发,让摄像头更加智能高效,能够输出高清流的图像视频。高性能目标跟踪多少钱
慧视光电基于AI图像处理的监控监管方案能够实现安全生产。湖南目标跟踪设备
差图像作为经典、常胜不衰的动目标检测方法,有其合理性,因为运动能够导致图像的变化,相邻的两幅或多幅图像之间的关系,或当前图像与背景图像之间的关系,尤其是图像差的关系,能较好地体现出运动所带来的变化。复杂背景下的运动目标检测和跟踪由于有良好的应用前景,成为当前研究的一个热点。图像监控系统的出发点是监控移动的目标,它们或是非法侵入,或是通过关键的场景,总之是移动才带来了对它们实施监控的可能。因此寻找移动的目标是图像监控的关键。湖南目标跟踪设备
与目标跟踪相关的文章

黑龙江目标跟踪功能
- 福建目标跟踪价格信息 2026-04-28
- 青海靠谱的目标跟踪 2026-04-28
- 省时省力目标跟踪哪里好 2026-04-28
- 吉林企业目标跟踪 2026-04-28
- 哪些目标跟踪技术 2026-04-28
- 数据目标跟踪 2026-04-28
- 广西移动目标跟踪 2026-04-28
- 四川稳定目标跟踪 2026-04-28
- 无线目标跟踪产品 2026-04-27
- 安徽目标跟踪参考价格 2026-04-27
- 陕西如何目标跟踪 2026-04-27
- 宁夏目标跟踪性价比 2026-04-27
与目标跟踪相关的产品




与目标跟踪相关的新闻
-
什么目标跟踪技术 2026-04-27 09:01:21无人机能够通过高空拍摄快速获取大范围、多角度的地面信息。但是传统的摄像头只能获取视频数据,对于许多需要进行数据分析的行业来说显然不够智能化,从无人机视频数据中快速获取提炼大量有价值的信息,不仅能够提升工作效率,还能够减少不小的成本支出。这就是无人机的AI识别能力。通过识别算法,在无人机工作时就对目标...
-
安徽自主可控目标跟踪 2026-04-27 19:01:08无人机追逐识别可以用在许多领域,如军备、安防。通过专业传感器设备的植入,让摄像头智能化,就可以对无人机进行追踪识别。成都慧视作为一家深耕图像处理领域的企业,在这方面也有着丰富的解决经验。在硬件领域,我们能够定制开发不同接口的图像处理板,如CVBS、SDI、LVDS、DVP、USB、Cameralin...
-
黑龙江目标跟踪售后服务 2026-04-26 09:01:13在无人机摄像头的基础上加装慧视光电开发的Viztra-LE026图像处理板,这是一块轻型化、低功耗的图像处理板,用在无人机上面既不会过多占用空间,也不会过多消耗续航,通过目标识别算法的赋能,就可以针对像东北虎这样的动物AI自动识别,一旦识别到老虎的特征物体,无人机就能够立即锁定并抵近观察,为消防和公...
-
国产化目标跟踪有什么 2026-04-26 06:01:32这样的无人机智慧“眼”可以通过搭载吊舱实现,吊舱内置各种规格的摄像机,能够实现多角度观察。而智能化则可以在吊舱的基础上植入高性能AI图像处理板。图像处理板能够对摄像机获取的图像进行AI智能分析,这样无人机就能够自动识别缺陷,然后进行信息留存、回传。在这个领域,成都慧视光电可以根据需求进行多接口图像处...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

重庆回放视频压缩与传输系统
2026-05-01 -
湖北窄带视频压缩与传输技术
2026-05-01 -

陕西视频压缩与传输
2026-05-01 -
云南双向对讲视频产品价格合理
2026-05-01 -
云南窄带高清音视频视频交互
2026-05-01 -
放心图像处理板诚信推荐
2026-05-01 -

陕西视频压缩与传输交互系统
2026-05-01 -
重庆边海防视频压缩与传输技术
2026-05-01 -
陕西专业目标识别联系方式
2026-05-01