车侣360全景影像系统与CMS(CollisionMitigationSystem)智能电子后视镜融合使用可以带来以下几个方面的使用价值:提供全景视野和后方监测:360全景影像系统可以提供的视觉信息,帮助驾驶员获得更广阔的视野。而CMS智能电子后视镜可以提供后方的实时监测和影像显示,高清晰度的后视图像可以准确展示后方交通状况。融合这两种技术可以为驾驶员提供更的视野,帮助他们更好地感知周围环境,增强驾驶安全性。实现早期危险预警:CMS智能电子后视镜通过集成各种传感器和算法,可以实时分析后方交通情况,并在检测到潜在危险(如追尾风险)时进行预警。结合360全景影像系统,可以将后方监测和预警能力与全景视野结合起来,实现更早期、更准确的危险预警,提高驾驶员对危险情况的识别和反应速度。 360全景可视系统除了可以帮助减轻泊车压力,对体型较大的汽车来说,还能避免很多的安全事故问题。车载360全景影像系统加装
车侣360全景影像系统融合360全景影像系统和CMS智能电子后视镜可以提升驾驶的安全性和便利性。驾驶员可以更清晰地观察车辆周围的交通状况,及时判断车辆间的距离和速度差距,避免潜在的碰撞风险。同时,电子后视镜还可以替代传统的后视镜,减少盲区,提供更宽广的视野和更清晰的影像,为驾驶员提供更舒适的驾驶体验。总之,360全景影像系统融合CMS智能电子后视镜可以提供全景视野和后方监测、实现早期危险预警,并提升驾驶安全性和便利性。这样的融合使用可以帮助驾驶员更好地掌握交通状况,减少事故风险,并提供更好的驾驶体验。挖掘机360全景影像设备品牌360全景影像检查时如果发现电极接线处有绿色氧化物,一定要用开水冲掉。

汽车360度全景影像是怎么显示的?360度全景影像是汽车行业较先进的产品,他依靠一个主机,加四个摄像头,就可以组成一个单独的全景系统。然后主机将四个摄像头所拍摄的。影像经过程序的告诉运行与处理,从而达到无缝拼接的效果!现在市面上的全景大都是依靠这种方式在处理,主要区别在于压缩以及画面情绪度上。主机采用的是国外进口的芯片,程序运行速度快,一般的行车记录仪他的压缩资源是20-35帧每秒,而我装的那款无缝全景影像他的压缩资源竟然达到75帧每秒,压缩速度是单一的行车记录仪的2.5倍。
360全景透S功能在挖掘机上的应用主要体现:
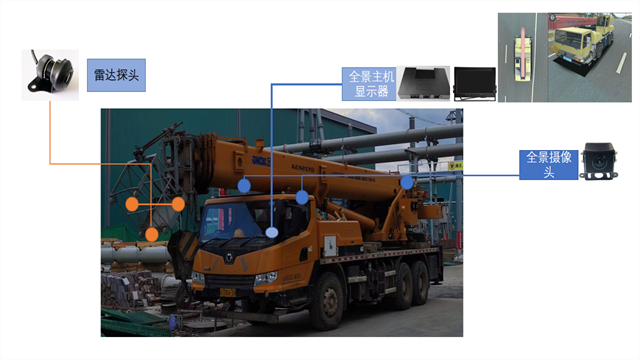
一、提升视野无死角全FW视野:通过在挖掘机上安装多个高清摄像头,360全景影像系统能够捕捉挖掘机周围的全FW图像,并通过全透明视觉功能实时拼接成一个完整的全景视图。驾驶员能够清晰地看到挖掘机周围的每一个角落,包括难以直接观察到的区域,如挖掘机底部和侧面,实现无死角视野。消除盲点:传统的挖掘机驾驶舱由于结构设计的原因,驾驶员在操作过程中可能会存在视野盲区。而360全景透S功能则能够消除这些盲点,提高驾驶员对周围环境的感知能力。
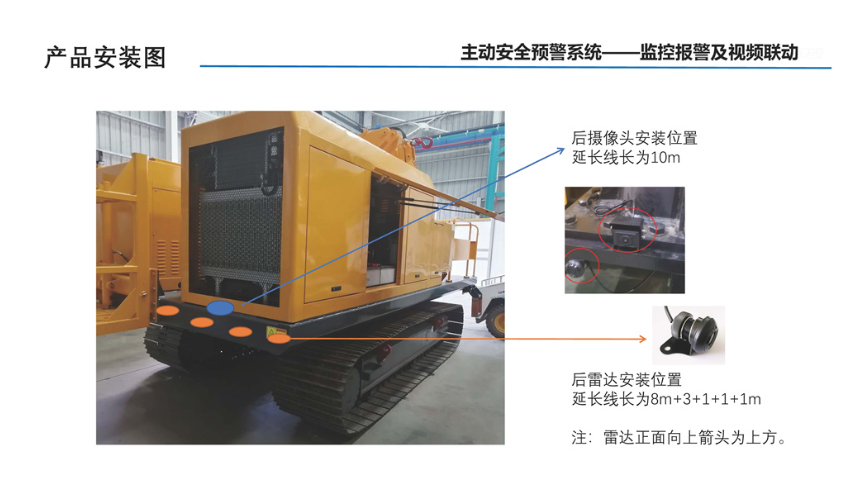
二、提高安全性和操作效率实时障碍物检测:结合图像识别和传感器技术,实时检测挖掘机周围的障碍物。当系统检测到障碍物时,立即发出警报,驾驶员更加准确地判断挖掘机的位置和姿态。结合GPS和其他定位技术,系统可提供精确的导航和定位信息,高清摄像头提供了高清晰度图像信息。
三、应用实例与效果实时监控:通过中控显示屏实时查看挖掘机周围的全景图像,及时发现并处理潜在的安全YH。
综上所述,360全景透S功能在挖掘机上的应用明显提升了挖掘机的视野范围、操作安全性、操作效率以及降低了维护成本。 360度全车可视系统,它是后视倒车影像系统的升级换代产品,是较新的真正意义上的“全景倒车影像系统”。

(上篇)车载AI360全景影像系统的技术原理:通过集成AI算法,增加预警与物体识别功能,其实现技术原理主要包括以下几个方面:一、图像采集与传输摄像头布局:车载360全景影像系统通常会在车辆的前、后、左、右以及车顶或后视镜等位置安装多个摄像头,以捕捉车辆周围的图像。图像传输:摄像头捕捉到的图像数据会被实时传输到车载处理器或显示屏上。这些图像数据会经过压缩和编码处理,以便进行实时传输和后续处理。二、图像拼接与融合图像拼接技术:车载处理器会对来自不同摄像头的图像数据进行拼接,形成一个完整的360度全景视图。这个过程涉及到图像校正、图像融合等处理,以确保终合成的全景图像能够准确地反映车辆周围的实际情况。图像校正:由于摄像头的位置和角度不同,所拍摄的图像会存在一定的畸变,如T视畸变和径向畸变等。因此,需要对图像进行适当的校正处理,以消除这些畸变。图像融合:将校正后的图像进行融合处理,形成一个无缝的全景画面。这个过程可能涉及到图像对齐、裁剪、旋转等操作,以确保图像能够无缝地拼接在一起。三、AI算法集成与物体识别AI算法应用:在图像拼接和融合的基础上,集成AI算法进行物体识别和预警。
因字数受限,待续,敬请看下篇。 360度全景影像功能工作原理并不复杂,其通过分布在车身前后左右的四枚超广角镜头进行拼接达到全景。挖掘机360全景影像设备品牌
AI360全景影像系统是一种集成摄像头技术,图像处理算法,传感器以及人工智能技术(AI)的车辆辅助驾驶系统.车载360全景影像系统加装
(上篇)在360全景拼接中,展示22米拖挂车转弯全景画面面临着多重技术难度,这些难度主要包括图像拼接的准确性、动态物体的处理、数据传输和存储以及实时性要求等方面。为了突破这些技术难度,可以采取以下策略:
1. 图像拼接的准确性采用高精度算法:由于拖挂车较长,在转弯过程中车头的动作和姿态变化较大,导致不同摄像头采集到的图像信息在拼接时可能出现错位和畸变。因此,需要采用更加精确的图像拼接算法和校正方法,如使用基于特征点的匹配算法(如SIFT、SURF等)来提高图像拼接的准确性。在拖挂车上安装多个高清摄像头,确保能够全方WEI捕捉车辆及其周围环境的图像信息。
2. 动态物体的处理动态物体检测与剔除:在拖挂车转弯过程中,可能会出现其他车辆、行人等动态物体。这些动态物体的出现会干扰图像拼接的准确性。采用先进的动态物体检测算法(如基于深度学习的方法)来检测和剔除这些干扰物。系统能够实时地进行处理并更新拼接后的全景图像,以确保图像的准确性和实时性。
车载360全景影像系统加装