RK3588作为瑞芯微国产化旗舰级芯片,用在目标跟踪领域,通常情况下跟踪帧率都在50Hz左右,这已经足够满足大多数应用领域的需求。但在许多特殊领域,如军备、边防,高帧频的视频输出能够在极短的时间内捕捉到更多的画面,实现高速动态场景的连续拍摄。高帧频的目标跟踪则能够获得更多的目标细节,便于做出下一步判...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
另外,经典的跟踪方法还有基于特征点的光流跟踪,在目标上提取一些特征点,然后在下一帧计算这些特征点的光流匹配点,统计得到目标的位置。在跟踪的过程中,需要不断补充新的特征点,删除置信度不佳的特征点,以此来适应目标在运动中的形状变化。本质上可以认为光流跟踪属于用特征点的来表征目标模型的方法。在深度学习和相关滤波的跟踪方法出现后,经典的跟踪方法都被舍弃,这主要是因为这些经典方法无法处理和适应复杂的跟踪变化,它们的鲁棒性和准确度都被前沿的算法所超越,但是,了解它们对理解跟踪过程是有必要的,有些方法在工程上仍然有十分重要的应用,常常被当作一种重要的辅助手段。慧视RK3399PRO板卡可以用于大型公共停车场。江苏信息化目标跟踪
目标跟踪
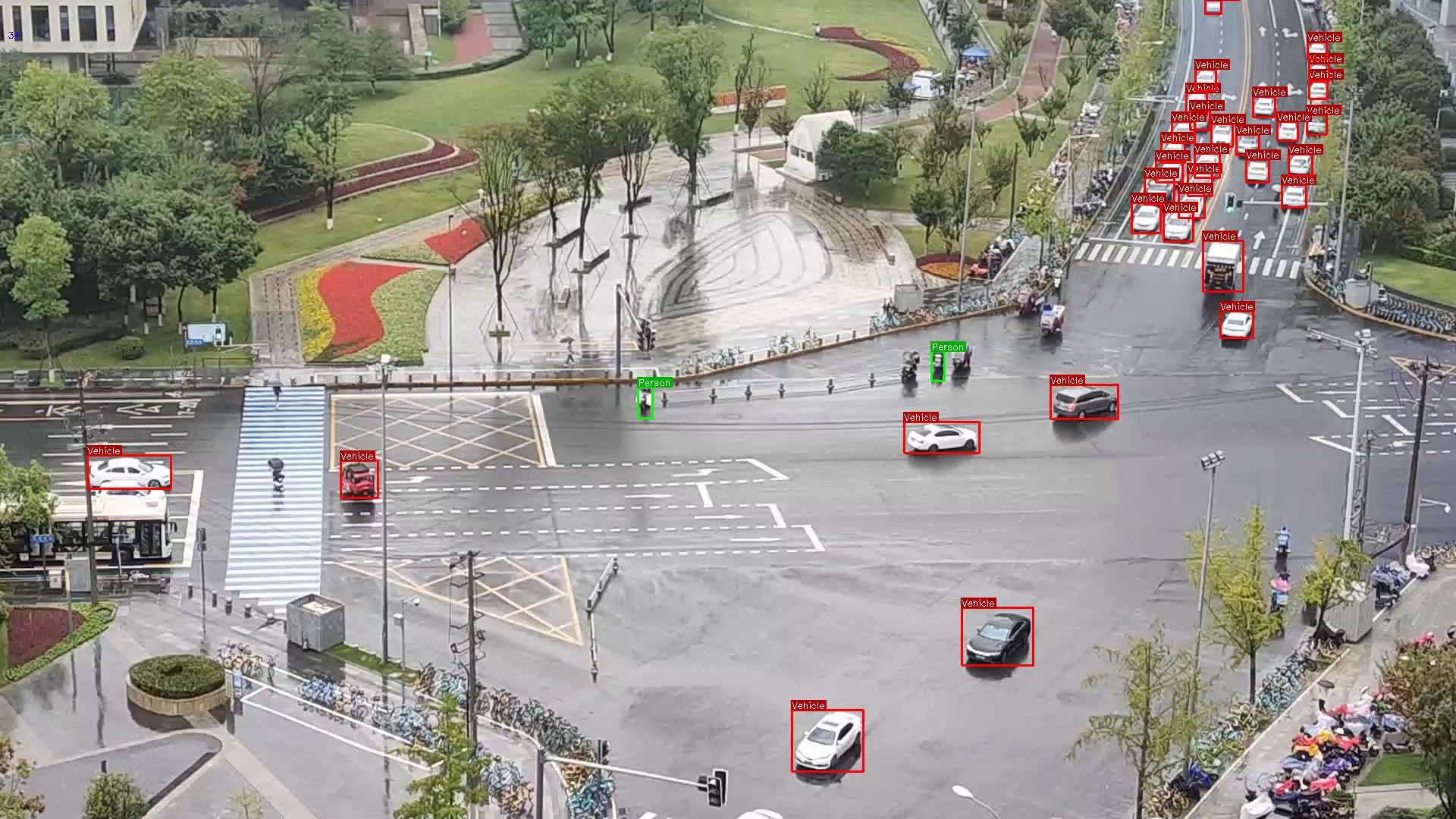
利用无人机实现智能化识别能够帮助我们提升许多工作效率,在很多行业都有应用。像安防巡检、交通管理等,飞在高空的无人机比传统的地面巡逻更有视野,更能搜集掌握全局信息,再通过和地面巡逻的配合,能够有效减少工作量。但是在无人机识别的过程中会遇到很多问题,比如当环境变得复杂时,识别的精度可能就会受到影响。AI识别算法是一种深度学习的算法,它不是一成不变的,它也需要适应不同的环境,因此对于AI算法的训练也必不可少。安全目标跟踪报价行情无人机吊舱能够通过定制算法和精细定位技术实现农药精细喷洒、农作物精细抛粮等操作。

用检测器模型去解决跟踪问题,遇到的比较大问题是训练数据不足。普通的检测任务中,因为检测物体的类别是已知的,可以收集大量数据来训练。例如 VOC、COCO 等检测数据集,都有着上万张图片用于训练。而如果我们将跟踪视为一个特殊的检测任务,检测物体的类别是由用户在首先帧的时候所指定的。这意味着能够用来训练的数据只是只是只有少数几张图片。这给检测器带来了很大的障碍。而慧视光电定制的目标跟踪算法可以有效的解决这个问题,通过AI自动图像标注平台SpeedDP的大量模型部署训练,能够有效解决数据训练不足的问题。
当两个图像之间还有旋转或比例变化时,往往使用基于控制点的方法进行图像配准。所谓特征点匹配就是在一帧图像中寻找具有不变性质的结构—特征点,例如,灰度局部极大值、局部边缘、角等,与另一帧图像中的同类特征点作匹配,从而求得该两帧图像之间的变换关系。从现实的观点看,在全部特征点中,只有部分能得到正确的匹配,这是因为特征点寻找算法并非完美无缺。特征点匹配方法具有:处理的数据量不断减少、可能匹配的数目少于互相关方法和受照度、几何的变化影响较小的优点。根据具体的振动情况,选择合适的特征点和速度较快的匹配策略是该任务研究的重点。目前的研究工作都致力于图像间的自动配准,如直接相关匹配,基于图像分割技术的配准,利用封闭轮廓的形心作为控制点的配准等。无人机可能会受到敌方势力或者强风等因素干扰,造成不同幅度的振动,从而影响板卡能否正常完成任务。

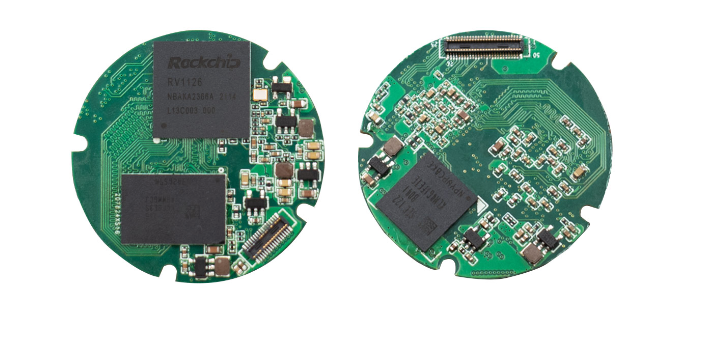
无人机在高速公路巡检中的作用越来越突出,特别是在十一黄金周这样的出行高峰,高速公路的安全和畅通至关重要。传统的巡检模式受到人力物力以及时空的限制,弊端很大,难以实现精细大面积的监控疏导。无人机灵活机动的特点则能够很好的弥补时空的局限,而想要进一步减少人力物力的付出,则需要打造智能化的无人机,通过AI赋能,让无人机更加聪明。打造智能化无人机可以在无人机吊舱的基础上加装高性能的AI图像处理设备,成都慧视开发的Viztra-HE030图像处理板凭借6.0TOPS的算力,用在十一黄金周这样的出行高峰期就能够很好地胜任工作,板卡采用了国产化芯片RK3588,在算法的赋能下,能够实现高效巡检。成都慧视开发的RK3588跟踪板怎么样啊?安徽目标跟踪进货价
慧视光电开发的慧视RK3588图像处理板,采用了国产高性能CPU。江苏信息化目标跟踪
相关滤波的跟踪算法始于2012年P.Martins提出的CSK方法,作者提出了一种基于循环矩阵的核跟踪方法,并且从数学上完美解决了密集采样(Dense Sampling)的问题,利用傅立叶变换快速实现了检测的过程。在训练分类器时,一般认为离目标位置较近的是正样本,而离目标较远的认为是负样本。回顾前面提到的TLD或Struck,他们都会在每一帧中随机地挑选一些块进行训练,学习到的特征是这些随机子窗口的特征,而CSK作者设计了一个密集采样的框架,能够学习到一个区域内所有图像块的特征。江苏信息化目标跟踪
与目标跟踪相关的文章
重庆自主可控目标跟踪
- 快速目标跟踪生产企业 2026-02-24
- 湖南国产化目标跟踪 2026-02-24
- 安徽光纤数据目标跟踪 2026-02-24
- 青海人防目标跟踪 2026-02-24
- 附近目标跟踪哪里买 2026-02-24
- 网络目标跟踪有哪些 2026-02-24
- 多系统适配目标跟踪诚信推荐 2026-02-24
- 多系统适配目标跟踪设备 2026-02-24
- 海南快速目标跟踪 2026-02-24
- 人防目标跟踪批发价格 2026-02-24
- 信息化目标跟踪生产企业 2026-02-24
- 湖南目标跟踪有什么 2026-02-24
与目标跟踪相关的产品


与目标跟踪相关的新闻
-
贵州目标跟踪推荐厂家 2026-02-14 14:06:22无人机的迅猛发展,使得无人机的反制技术也水涨船高,常见的有电子干扰、无人机识别对抗等方式。后者采用图像识别技术,通过在无人机摄像头的基础上加装AI高性能图像处理板,在算法的作用下,就具备无人机识别的功能,为无人机对抗创造条件。由于无人机飞行速度极快,因此针对于这样环境下的AI识别需要“与众不同”的图...
-
数据目标跟踪功能 2026-02-14 00:11:44目标检测与目标跟踪这两个任务有着密切的联系。针对目标跟踪任务,微软亚洲研究院提出了一种通过目标检测技术来解决的新视角,采用简洁、统一而高效的“目标检测+小样本学习”框架,在多个主流数据集上均取得了杰出性能。目标跟踪(Object tracking)与目标检测(Object detection)是计算...
-
福建目标跟踪功能 2026-02-14 08:01:36深度学习技术,特别是神经网络,已经在图像和语音跟踪领域取得了不小的进展。这些技术可以应用于物联网设备,实现更加智能化的交互和控制。物联网、人工智能和大数据的融合正在开启一个智能化的新纪元。这种融合不仅推动了技术革新,还为各行各业带来了深刻的变革。随着技术的不断发展,这一融合将推动智能家居、智能城市、...
-
湖北目标跟踪功效 2026-02-14 07:01:41长时间一直进行这样的图像标注工作,那无疑是枯燥而乏味的,手酸不说,更多的是精神上的折磨,进而效率大打折扣。但这又是算法提升的必要途径,无法跳过,当项目紧急时,甚至需要多人加班加点赶进度。这样的痛苦现状急需改变!慧视光电的算法工程师为了提高这一的效率,开发了一个深度学习算法开发平台SpeedDP。它的...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

网络目标跟踪有哪些
2026-02-24 -

吉林低压线目标识别办公软件
2026-02-24 -

多系统适配目标跟踪诚信推荐
2026-02-24 -
多系统适配目标跟踪设备
2026-02-24 -
海南快速目标跟踪
2026-02-24 -
上海网络目标识别远程协助
2026-02-24 -

重庆智慧城市AI智能视觉识别
2026-02-24 -

成都AI智能分析软件
2026-02-24 -

山西智慧城市AI智能供应商
2026-02-24