- 品牌
- 凡华
- 型号
- 齐全
- 产地
- 无锡宜兴
- 可售卖地
- 全国
- 是否定制
- 是
需要搬运或运输晶舟转换器时,保养工作尤为重要。在搬运前,先切断电源,拆除易损部件,并做好防护措施,如使用泡沫垫或海绵包裹。对于设备主体,要使用合适的搬运工具,如叉车、吊车等,并确保搬运工具的承载能力足够。在搬运过程中,要避免设备受到剧烈震动和碰撞。运输时,将设备固定在运输车辆上,防止其在运输途中晃动。同时,要注意运输环境的温度和湿度,避免设备在恶劣环境下受损。到达目的地后,重新安装拆除的部件,并对设备进行quan mian 检查和调试,确保其能正常运行。未来,晶舟转换器将继续朝着更高效、更智能、更环保的方向发展,为半导体产业的持续发展贡献力量。湖南FANHUA晶舟转换器公司
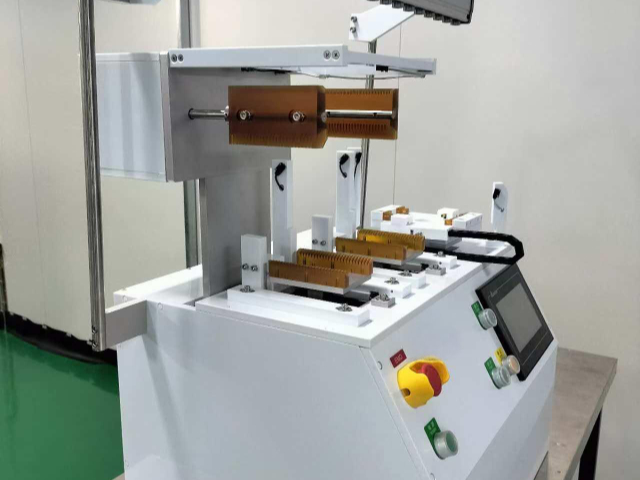
晶舟转换器:精 zhun 与效率的融合晶舟转换器作为半导体制造行业的重要设备,完美融合了精 zhun 与效率两大关键要素。从精 zhun 度方面来说,晶舟转换器配备了先进的光学定位系统和高精度传感器。这些装置能够实时监测晶圆的位置和状态,确保机械臂在抓取和放置晶圆时达到亚微米级的精度。这种高精度的操作,有效避免了晶圆在转移过程中的碰撞与损伤,极大提高了产品的良品率。在效率层面,晶舟转换器采用了高速伺服电机和优化的运动控制算法。机械臂能够快速响应指令,实现高速、平稳的晶圆转移动作。其高效的转移速度使得生产线上的晶圆流转更加顺畅,da da 缩短了生产周期,提高了企业的产能。不仅如此,晶舟转换器还具备出色的兼容性。它可以适配不同尺寸、不同材质的晶舟和晶圆,满足多样化的生产需求。无论是大规模生产标准芯片,还是小批量生产定制化芯片,晶舟转换器都能游刃有余地完成任务。在半导体制造的各个环节,如芯片制造、封装测试等,晶舟转换器都凭借其精 zhun 与效率的特性,发挥着至关重要的作用,助力企业在市场竞争中脱颖而出。湖南FANHUA晶舟转换器公司无论是在家庭娱乐还是办公学习场景中,这款转换器都能发挥重要作用。
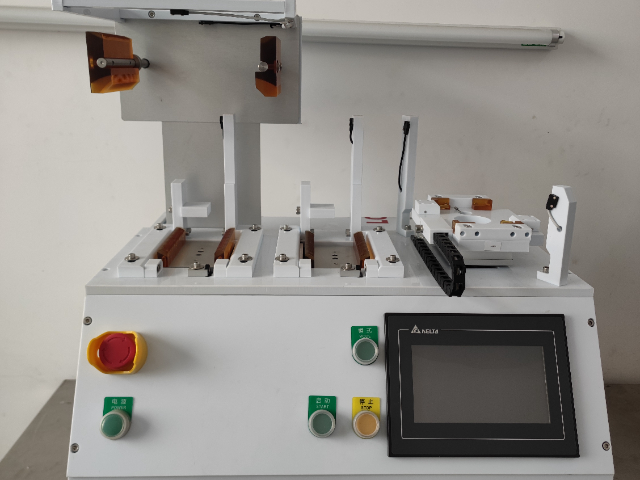
晶舟转换器工作流程:
一、晶舟识别与定位:当晶舟进入晶舟转换器的工作区域时,设备首先通过安装在特定位置的传感器对晶舟进行识别。控制系统根据传感器反馈的信息,计算出晶舟的精确位置,并控制机械手臂移动到相应位置进行抓取准备。二、晶舟抓取:机械手臂按照控制系统的指令,精确地移动到晶舟上方,抓取机构启动,通过特定的方式与晶舟进行连接。在抓取过程中,抓取机构会实时监测抓取力的大小,确保抓取的稳定性。一旦抓取成功,机械手臂会缓慢提升晶舟,同时再次检查晶舟的状态,确保其在搬运过程中的安全性。
三、晶舟转移:机械手臂在动力驱动系统的带动下,沿着导轨快速移动到目标设备的接口位置。在移动过程中,控制系统会对机械手臂的运动轨迹进行实时监控和调整,确保晶舟在转移过程中不会发生碰撞或晃动。当机械手臂到达目标位置后,会进行精确的定位,使晶舟与目标设备的接口完美对接。
四、晶舟放置:在确认晶舟与目标设备接口对准无误后,抓取机构松开晶舟,将其平稳地放置在目标设备上。然后,机械手臂撤离,完成一次晶舟转换操作。整个过程在控制系统的精确控制下,高效、准确地完成,确保了半导体制造过程中晶舟流转的顺畅性。
晶舟转换器在半导体生产线自动化升级中的应用:
随着半导体产业的发展,生产线自动化升级成为趋势,晶舟转换器在其中发挥着关键作用。在传统生产线向自动化升级过程中,晶舟转换器作为自动化转移的he xin 设备,可与自动化控制系统集成。它能够根据预设的生产程序,自动完成晶圆在不同设备间的转移,减少人工干预,提高生产效率和产品质量稳定性。例如,在自动化的光刻、蚀刻、清洗生产线中,晶舟转换器与各设备的自动化装卸系统对接,实现晶圆的自动上料、转移和下料。其高速、精 zhun 的转移能力,满足了自动化生产线对快速、高效生产的需求。同时,晶舟转换器还能与生产管理系统相连,实时反馈转移状态和生产数据,为生产线的优化和管理提供支持,推动半导体生产线向高度自动化方向发展。 无论是对于新手用户还是专业人士来说,晶舟转换器都是一个值得信赖的选择。

晶舟转换器行业面临的挑战与机遇挑战:技术研发难度大是行业面临的主要挑战之一。由于半导体制造工艺的复杂性和高精度要求,涂胶显影机的研发需要大量的资金投入、 gao duan 的人才队伍和长期的技术积累。同时,国际竞争激烈,国内企业在品牌建设和市场开拓方面面临较大压力。另外,半导体产业受全球经济环境和贸易政策的影响较大,不确定性因素较多。机遇:随着国内半导体产业的大力发展,国家政策的支持以及巨大的本土市场需求为涂胶显影机行业提供了广阔的发展空间。同时,5G、人工智能等新兴技术领域的崛起为半导体产业注入新的活力,也为涂胶显影机行业带来了持续的市场需求。在先进制程技术中,晶舟转换器的重要性日益凸显,成为提升芯片性能的关键设备之一。湖北FANHUA晶舟转换器报价
晶舟转换器提供了全方面的售后服务,让用户在使用过程中无后顾之忧。湖南FANHUA晶舟转换器公司
晶舟转换器的工作原理基于自动化控制和机械传动原理。当接收到来自上游设备或生产系统的指令后,电气控制部分的控制器根据预设的程序,驱动机械传动部分的电机运转。电机通过减速机、传动皮带等传动装置,带动晶舟进行相应的平移、升降或旋转动作,使晶舟从一个位置准确地移动到另一个需要的位置。在这个过程中,定位与夹紧装置会实时对晶舟进行定位和夹紧,确保其位置精度。同时,传感器不断将晶舟的位置和状态信息反馈给控制器,控制器根据反馈信息进行实时调整,以保证整个转换过程的准确性和稳定性。应用场景湖南FANHUA晶舟转换器公司
- 青海FXDP100晶舟转换器厂家 2026-01-31
- 四川凡华晶舟转换器哪家好 2026-01-30
- FANHUA晶舟转换器生产厂家 2026-01-30
- 山西FXDP100晶舟转换器 2026-01-28
- 浙江FANHUA晶舟转换器多少钱 2026-01-28
- 湖南FANHUA晶舟转换器哪家好 2026-01-27
- 四川FXDP100晶舟转换器供应商 2026-01-26
- 海南FANHUA晶舟转换器多少钱 2026-01-26