
- 品牌
- 来拓
- 型号
- LT
企业在采购工控设备时,需要综合考虑多个因素。首先是设备的性能指标,包括处理速度、存储容量、精度、可靠性等,要根据企业的生产工艺要求和未来发展规划选择合适性能的设备。例如,对于高速自动化生产线,需要采购处理速度快、响应时间短的 PLC 或工业计算机。其次是设备的兼容性,要确保新采购的设备能够与企业现有的生产系统、其他工控设备以及软件平台相互兼容,实现无缝对接和协同工作。价格也是一个重要的考虑因素,企业需要在设备性能和价格之间找到平衡,既要保证设备质量,又要控制采购成本。此外,供应商的信誉和售后服务也是关键,选择有良好口碑、能够提供及时技术支持和售后服务的供应商,在设备安装调试、使用过程中遇到问题时能够得到快速解决,减少设备停机时间,保障生产的正常进行。工控设备的无线传感网络,拓展工业数据采集范围广度。惠山区工控设备公司
工控设备
在新能源产业,工控设备扮演着重要角色。以太阳能光伏发电为例,工控设备用于太阳能电池板的跟踪控制、逆变器的运行管理以及整个光伏电站的监控与调度。太阳能电池板跟踪系统中的工控设备,根据太阳的位置变化,精确调整电池板的角度,很大限度地提高太阳能的接收效率。逆变器则在工控设备的控制下,将太阳能电池板产生的直流电转换为交流电,并实现对电能质量的控制和优化。在风力发电领域,工控设备对风力发电机组的转速、桨距角、发电功率等参数进行控制,确保风力发电机组在不同风速条件下稳定、高效地运行。同时,通过对新能源电站的集中监控,工控设备可以实现对多个发电单元的协调管理,提高整个电站的发电效率和可靠性,促进新能源产业的发展。惠山区工控设备公司工控设备以智能算法,精确调控工厂复杂生产流程与参数。

工控设备的维护与保养对于其长期稳定运行至关重要。首先,要定期对设备进行清洁,去除灰尘、油污等杂质,防止因散热不良或短路等问题导致设备故障。例如,对于 PLC 控制柜,应定期打开柜门,使用干净的压缩空气或软毛刷清理内部元件表面的灰尘。其次,要检查设备的连接线路,包括电源线、信号线等,确保连接牢固,无松动、破损等现象。同时,对设备的硬件元件进行定期检测,如传感器的校准、执行器的动作测试等,及时发现并更换老化或损坏的元件。在软件方面,要定期备份控制程序,防止因程序丢失或损坏而影响设备运行,并及时更新软件补丁,修复安全漏洞和功能缺陷。此外,建立完善的设备维护档案,记录每次维护保养的时间、内容和发现的问题,以便对设备的运行状况进行跟踪分析,制定合理的维护计划。
借助现代通信技术,工控设备实现了远程监控与管理功能。通过在工控设备上安装网络通信模块,将设备运行数据实时传输到远程监控中心。管理人员可以在监控中心通过电脑或手机等终端设备,随时随地查看设备的运行状态、生产数据等信息,并对设备进行远程操作和参数调整。例如,在电力变电站中,运维人员无需到现场,即可通过远程监控系统了解变电站内设备的运行情况,及时发现异常并进行处理,提高了运维效率,降低了运维成本。同时,远程监控与管理功能还便于企业对分布在不同地区的生产设施进行集中管理,实现资源的优化配置和协同生产。耐用工控设备,耐受高温高压,服务于石化工业流程。
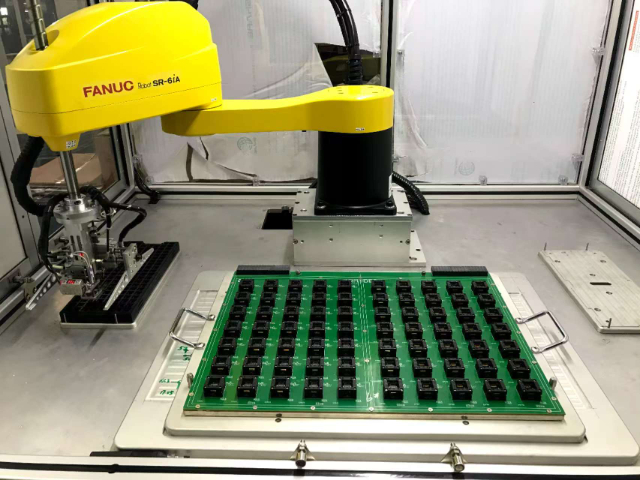
工控设备对生产效率的提升有着出色的贡献。在现代化工厂中,自动化生产线借助工控设备实现了连续、高速运转。例如在电子芯片制造工厂,工业机器人在工控系统的指挥下,能够以极高的速度和精度进行芯片的封装、测试等工作,其工作效率远远高于人工操作。而且,工控设备可以根据生产任务的需求,快速调整生产参数和工艺流程,实现不同产品型号的灵活切换生产,缩短了生产周期,提高了企业对市场变化的响应速度,从而在激烈的市场竞争中抢占先机。工控设备的节能技术,助力工业企业实现绿色环保发展。高新区逆变器工控设备交期
先进的工控设备,为自动化生产线注入高效稳定的动力源泉。惠山区工控设备公司
石油开采与炼化行业存在诸多安全风险,工控设备通过一系列措施保障其生产过程的安全。在石油开采的钻井平台上,工控设备对钻井过程中的压力、温度、液位等参数进行实时监测和控制。例如,当钻井液的压力出现异常波动时,工控系统会立即调整泥浆泵的工作参数,确保井壁的稳定,防止井喷事故的发生。在石油炼化过程中,DCS 对炼油装置中的各种化学反应进行精确控制,严格控制反应温度、压力和物料流量,避免因反应失控导致的炸破或火灾事故。同时,工控设备配备了多重安全联锁装置,如当某个设备出现故障或工艺参数超出安全范围时,安全联锁会自动启动,停止相关设备的运行,并将危险区域隔离。此外,通过网络安全技术,工控设备防止外部网站攻击和恶意篡改数据,保障石油开采与炼化过程中的信息安全,确保人员生命安全和企业财产安全。惠山区工控设备公司
工业机器人在执行任务时,其轨迹规划由工控设备中的特定算法实现。轨迹规划算法的关键是根据机器人的任务要求和工作环境,确定机器人末端执行器在空间中的运动路径和速度。例如,在机器人弧焊任务中,工控设备首先根据焊接工件的形状、焊缝的位置和要求,将焊缝分解为多个离散的路径点。然后,采用插值算法,如直线插值、圆弧插值或样条曲线插值等,在这些路径点之间生成连续平滑的运动轨迹。同时,考虑到机器人的运动学约束,如关节的运动范围、速度限制和加速度限制等,算法会对生成的轨迹进行优化调整,确保机器人能够以合理的姿态和速度沿着轨迹运动,避免出现关节超限或运动不稳定的情况。此外,在轨迹规划过程中,还会考虑到障碍物的避让,...
- 梁溪区汽车零部件工控设备价格 2026-03-19
- 张家港组装工控设备 2026-03-19
- 姑苏区工控设备种类 2026-03-19
- 新吴区工控设备复位 2026-03-19
- 姑苏区逆变器工控设备原理 2026-03-19
- 浙江工控设备电源 2026-03-18
- 青浦区工控设备网 2026-03-18
- 相城区汽车零部件工控设备厂家 2026-03-18
- 武进区工控设备有限公司 2026-03-18
- 江阴新能源电池工控设备价格 2026-03-18


- 虎丘区组装工控设备 2026-03-17
- 锡山区生产线工控设备原理 2026-03-17
- 工业园区工控设备公司 2026-03-17
- 滨湖区组装工控设备交期 2026-02-26
- 姑苏区西门子工控设备 2026-02-26
- 锡山区工控设备保养 2026-02-26


- 姑苏区逆变器工控设备原理 03-19
- 浙江工控设备电源 03-18
- 青浦区工控设备网 03-18
- 相城区汽车零部件工控设备厂家 03-18
- 武进区工控设备有限公司 03-18
- 江阴新能源电池工控设备价格 03-18
- 南京测试工控设备方案 03-18
- 宁波工控设备店 03-17
- 梁溪区工控设备网 03-17
- 青浦区工控设备电源 03-17