
- 品牌
- 来拓
- 型号
- LT
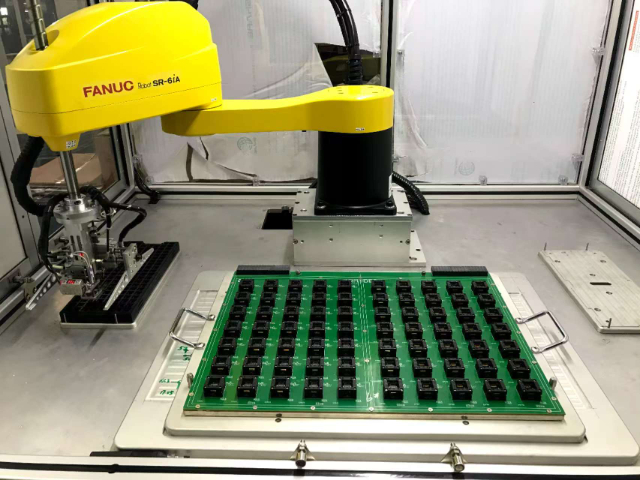
工控设备对生产效率的提升有着出色的贡献。在现代化工厂中,自动化生产线借助工控设备实现了连续、高速运转。例如在电子芯片制造工厂,工业机器人在工控系统的指挥下,能够以极高的速度和精度进行芯片的封装、测试等工作,其工作效率远远高于人工操作。而且,工控设备可以根据生产任务的需求,快速调整生产参数和工艺流程,实现不同产品型号的灵活切换生产,缩短了生产周期,提高了企业对市场变化的响应速度,从而在激烈的市场竞争中抢占先机。可靠工控设备,在电力系统中维持稳定供电不出现差错。江苏生产线工控设备方案
工控设备
水泥生产是一个复杂的工业过程,工控设备对于保障其稳定与高效运行起着决定性作用。在水泥生产的原料研磨环节,大型球磨机在工控设备的控制下,精确调节研磨时间、研磨介质的填充量和转速,确保原料被研磨至合适的粒度。例如,PLC 根据原料的硬度和流量信息,实时调整球磨机的运行参数,以达到比较好的研磨效果。在水泥窑中,工控设备对窑内的温度、压力、气体成分等参数进行严格监控和控制。通过燃烧器的自动调节,使燃料与空气充分混合燃烧,维持窑内稳定的高温环境,保证水泥熟料的质量。同时,在水泥成品的包装环节,自动化包装机在工控设备的指挥下,按照设定的重量和包装规格,快速而准确地完成水泥的包装作业。整个水泥生产过程中,工控设备的应用不仅提高了生产效率,减少了能源消耗,还保证了水泥产品的质量稳定性,满足了建筑行业等对水泥的大量需求。虎丘区工控设备保养智能工控设备,学习优化控制策略,提升工业效益明显。

工控设备的维护与保养对于其长期稳定运行至关重要。首先,要定期对设备进行清洁,去除灰尘、油污等杂质,防止因散热不良或短路等问题导致设备故障。例如,对于 PLC 控制柜,应定期打开柜门,使用干净的压缩空气或软毛刷清理内部元件表面的灰尘。其次,要检查设备的连接线路,包括电源线、信号线等,确保连接牢固,无松动、破损等现象。同时,对设备的硬件元件进行定期检测,如传感器的校准、执行器的动作测试等,及时发现并更换老化或损坏的元件。在软件方面,要定期备份控制程序,防止因程序丢失或损坏而影响设备运行,并及时更新软件补丁,修复安全漏洞和功能缺陷。此外,建立完善的设备维护档案,记录每次维护保养的时间、内容和发现的问题,以便对设备的运行状况进行跟踪分析,制定合理的维护计划。
工控设备是工业 4.0 的重要基石。在工业 4.0 时代,智能制造成为主流趋势,而工控设备的智能化升级是实现智能制造的关键环节。智能化的工控设备能够实现自我感知、自我诊断、自我决策和自我调整。例如,智能传感器不仅可以采集物理量数据,还能对数据进行初步处理和分析,将有价值的信息传输给控制系统。控制系统根据这些信息,结合预设的算法和模型,自动优化生产工艺参数,调整设备运行状态,实现生产过程的智能化控制。同时,工控设备通过工业互联网与企业内部的管理系统、供应链系统以及外部的合作伙伴进行互联互通,实现信息共享和协同工作,推动整个工业生态系统向智能化、网络化、协同化方向发展。工控设备的系统集成,打造高效统一的工业自动化平台。

企业在采购工控设备时,需要综合考虑多个因素。首先是设备的性能指标,包括处理速度、存储容量、精度、可靠性等,要根据企业的生产工艺要求和未来发展规划选择合适性能的设备。例如,对于高速自动化生产线,需要采购处理速度快、响应时间短的 PLC 或工业计算机。其次是设备的兼容性,要确保新采购的设备能够与企业现有的生产系统、其他工控设备以及软件平台相互兼容,实现无缝对接和协同工作。价格也是一个重要的考虑因素,企业需要在设备性能和价格之间找到平衡,既要保证设备质量,又要控制采购成本。此外,供应商的信誉和售后服务也是关键,选择有良好口碑、能够提供及时技术支持和售后服务的供应商,在设备安装调试、使用过程中遇到问题时能够得到快速解决,减少设备停机时间,保障生产的正常进行。工控设备的无线传感网络,拓展工业数据采集范围广度。江苏西门子工控设备
工控设备的远程监控,让企业对生产状况了如指掌实时掌控。江苏生产线工控设备方案
造纸工业是能源消耗和污染物排放较大的行业,工控设备在其中实现了节能减排与高效生产的协同发展。在造纸机的运行过程中,工控设备通过对纸浆流量、网速、压榨力等参数的精确控制,提高纸张的生产效率和质量。例如,DCS 根据纸张的定量要求,精细调节纸浆的供给量,避免纸浆浪费。同时,在能源管理方面,工控设备对造纸厂的蒸汽系统、电力系统进行优化控制。通过监测和分析各个生产环节的能源消耗情况,调整设备的运行模式,如合理安排电机的启停、优化蒸汽的分配,降低能源消耗。在污水处理环节,工控设备控制污水处理设备的运行,提高污水的处理效率,减少污染物排放。这种节能减排与高效生产的协同效应,有助于造纸企业降低生产成本,提高经济效益,同时也符合环保要求,促进了造纸工业的可持续发展。江苏生产线工控设备方案
工业机器人在执行任务时,其轨迹规划由工控设备中的特定算法实现。轨迹规划算法的关键是根据机器人的任务要求和工作环境,确定机器人末端执行器在空间中的运动路径和速度。例如,在机器人弧焊任务中,工控设备首先根据焊接工件的形状、焊缝的位置和要求,将焊缝分解为多个离散的路径点。然后,采用插值算法,如直线插值、圆弧插值或样条曲线插值等,在这些路径点之间生成连续平滑的运动轨迹。同时,考虑到机器人的运动学约束,如关节的运动范围、速度限制和加速度限制等,算法会对生成的轨迹进行优化调整,确保机器人能够以合理的姿态和速度沿着轨迹运动,避免出现关节超限或运动不稳定的情况。此外,在轨迹规划过程中,还会考虑到障碍物的避让,...
- 梁溪区汽车零部件工控设备价格 2026-03-19
- 张家港组装工控设备 2026-03-19
- 姑苏区工控设备种类 2026-03-19
- 新吴区工控设备复位 2026-03-19
- 姑苏区逆变器工控设备原理 2026-03-19
- 浙江工控设备电源 2026-03-18
- 青浦区工控设备网 2026-03-18
- 相城区汽车零部件工控设备厂家 2026-03-18
- 武进区工控设备有限公司 2026-03-18
- 江阴新能源电池工控设备价格 2026-03-18


- 虎丘区组装工控设备 2026-03-17
- 锡山区生产线工控设备原理 2026-03-17
- 工业园区工控设备公司 2026-03-17
- 滨湖区组装工控设备交期 2026-02-26
- 姑苏区西门子工控设备 2026-02-26
- 锡山区工控设备保养 2026-02-26



- 姑苏区逆变器工控设备原理 03-19
- 浙江工控设备电源 03-18
- 青浦区工控设备网 03-18
- 相城区汽车零部件工控设备厂家 03-18
- 武进区工控设备有限公司 03-18
- 江阴新能源电池工控设备价格 03-18
- 南京测试工控设备方案 03-18
- 宁波工控设备店 03-17
- 梁溪区工控设备网 03-17
- 青浦区工控设备电源 03-17