- 品牌
- 智慧动锂,智锂狗
- 型号
- ZLG801L等
目前BMS架构主要分为集中式架构和分布式架构。集中式BMS将所有电芯统一用一个BMS硬件采集,适用于电芯少的场景。集中式BMS具有成本低、结构紧凑、可靠性高的优点,一般常见于容量低、总压低、电池系统体积小的场景中,如电动工具、机器人(搬运机器人、助力机器人)、IOT智能家居(扫地机器人、电动吸尘器)、电动叉车、电动低速车(电动自行车、电动摩托、电动观光车、电动巡逻车、电动高尔夫球车等)、轻混合动力汽车。目前行业内分布式BMS的各种术语五花八门,不同的公司,不同的叫法。动力电池BMS大多是主从两层架构。储能BMS则因为电池组规模较大,多数都是三层架构,在从控、主控之上,还有一层总控。BMS中的电池均衡管理是什么?电动摩托车BMS云平台

两轮电动车BMS行业内成为两轮电动车电池保护板分为硬件板与软件板。所谓硬件板,就是保护板上没有可以进行编程的芯片,只是按照特定的线路进行连接,保护板的参数是固定的。这一类保护板一般成本较低,功能简单,很难实现逻辑上的特殊控制要求。而软件板则是在硬件板的基础上,加了可以编程的芯片,因此这类保护板除了实现基本功能以外,还能实现很多特殊的功能。只要通过修改程序和添加外设,实现更多功能,比如远程引爆车辆中的锂电池。无人机BMS价格BMS是储能电池系统的中心子系统之一。
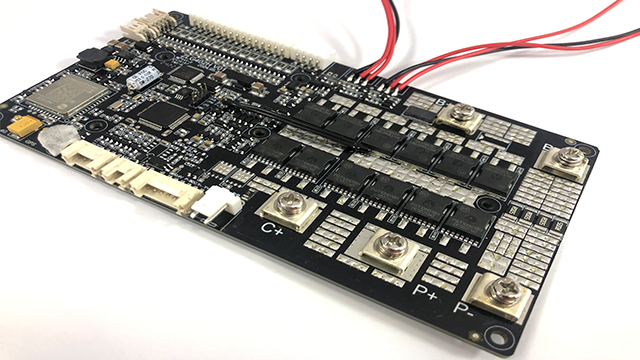
电池保护板的自身参数,比如自耗电分为工作自耗电和静态(睡眠)自耗电,保护板自耗电的电流一般是ua级别。工作自耗电电流较大,主要为保护芯片、mos驱动等消耗。保护板的自耗电太大会过多消耗电池电量,如果长时间搁置的电池,保护板自耗电可能导致电池亏电。自耗电和内阻等,他们不起保护作用,但是对电池的性能是有影响的。保护板的主回路内阻也是一个很重要的参数,保护板的主回路内阻主要来源于pcb板上铺设阻值,mos的阻值(主要)和分流电阻的阻值。在保护板进行充放电时,特别是mos部分,会产生大量的热,因此一般保护板的mos上都需要贴一大块的铝片用于导热和散热。除了这些基本功能以外,为了使用不同的应用场景个需求,保护板还有各种各样的附加功能(如均衡功能),特别是带软件的保护板,功能更是异常丰富,比如蓝牙、wifi、GPS、串口、CAN等应有尽有,再高阶一点,就成了电池管理系统了(BMS)。
测量电池容量的理想方法是库仑计数法,即通过测量一段时间内流入和流出的电流,进而得到流入或者流出电量。SOC=总容量-(放电电流-充电电流)*时间根据电池测量系统的不同,有多种测量放电或充电电流的方法。电流分流器:分流器是一个低欧姆电阻器,用于测量电流。整个电流流经分流器并产生电压降,然后进行测量。这种方法会在电阻器上产生轻微的功率损耗。霍尔效应传感器:这种传感器通过磁场变化测量电流。它消除了电流分流器典型的功率损耗问题,但成本较高,且无法承受大电流。巨磁电阻(GMR)传感器:这种传感器用作磁场检测器,比霍尔效应传感器更灵敏(也更昂贵)。它们的精确度很高。库仑测量涉及的计算相当复杂,主要由微控制器完成。库仑计数法是一种安培小时积分法,可有效量化一段时间内的电量,提供动态、连续的状态更新。开路电压(OCV)通过计算电压与电量之间的直接关系,快速评估剩余电量。不过,库仑计数法会因传感器漂移或电池性能变化而随时间累积误差,而开路电压则也可能受到温度波动和电池老化的影响。智慧动锂高压工厂储能BMS系统,采用高速32位MCU和高性能车规级AFE,保证高效率和高精度二级或三级架构。

被动均衡主要依赖于电阻放电方式,将电压较高的电池中的电量以热能的形式释放,从而为其他电池创造更多的充电时间。整个系统的电量受限于容量较小的电池。在充电过程中,锂电池通常设有一个上限保护电压值,一旦某一串电池达到此值,锂电池保护板便会切断充电回路,停止充电。被动均衡的优点在于成本低廉且电路设计相对简单,但其缺点在于只基于较低电池残余量进行均衡,无法提升残量较少的电池容量,且均衡过程中释放的热量完全被浪费了。BMS锂电池保护板可以按照串数和持续放电电流大小来区分。户外电源BMS电池管理系统软件设计
在电动汽车中,BMS确保电池组的性能和安全性,延长电池寿命,提高车辆续航能力和驾驶安全性。电动摩托车BMS云平台
开路电压法估算电池SOC;铅酸蓄电池的SOC与其开路电压(OCV)之间存在近似线性关系,基于电池OCV的方法是,当电池与负载断开时间超过两小时时,电池的OCV与SOC成正比。然而,如此长的断开时间对于电池来说可能太长而无法实现。与铅酸电池不同,锂离子电池的OCV与SOC之间不存在线性关系。锂离子电池SOC与OCV之间的典型关系如图所示。OCV与SOC的关系是通过对锂离子电池施加脉冲负载,然后让电池达到平衡而确定的。所有电池的OCV与SOC之间的关系不可能完全相同。由于不同电池的传统OCV-SOC有所不同,因此需要测量OCV-SOC的关系,以准确估算SOC。电动摩托车BMS云平台
- 中颖BMS管理系统 2026-01-03
- 中颖电子BMS系统 2026-01-03
- 电动车BMS生产厂家 2026-01-03
- 便携式电源BMS零售价 2026-01-03
- 储能柜BMS电池管理芯片 2026-01-03
- 储能柜BMS保护IC 2026-01-03

