- 品牌
- 来拓
- 型号
- LT
当前,工控设备呈现出一系列技术创新趋势。一是智能化程度不断提高,设备具备更强的自主学习和决策能力,例如通过人工智能算法对生产数据进行深度分析,自动优化生产工艺。二是网络化进一步深化,工业以太网、5G 等通信技术在工控设备中的应用范围更加广,实现设备之间、设备与系统之间的高速、低延迟通信,促进工业互联网的发展。三是微型化与集成化,将更多的功能模块集成到更小的芯片或设备中,减小设备体积,提高设备的集成度和便携性,便于在一些空间有限的应用场景中使用。四是绿色节能技术的应用,采用新型节能材料和节能控制算法,降低设备的能耗和对环境的影响。这些技术创新趋势将推动工控设备行业向更高效率、更智能、更环保的方向发展,为工业生产带来更多的变革和机遇。工控设备的网络连接,促进工业设备间协同合作无间配合。吴中区工控设备店
工控设备
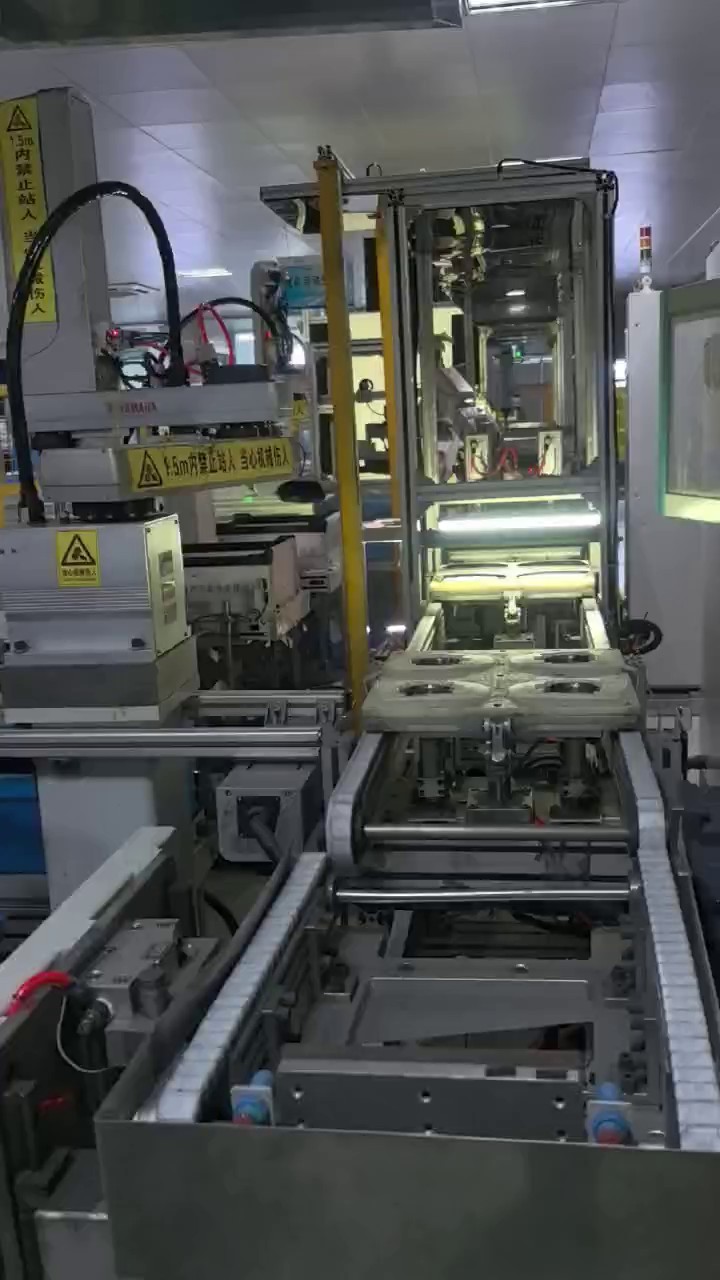
电子制造行业对生产精度和效率有着极高的要求,工控设备在此发挥着巨大的助力作用。在芯片制造过程中,工业计算机(IPC)与高精度的运动控制系统相结合,控制着光刻机、刻蚀机等设备的微观操作。这些设备需要在纳米级别的尺度上进行加工,工控设备的高稳定性和精确控制能力确保了每一个芯片的电路图案能够被精确地印制和刻蚀。例如,运动控制系统能够精确控制光刻机的工作台移动,使其定位误差控制在极小范围内,保证芯片光刻的精度。同时,在电子元件的贴片和组装环节,自动化设备在工控设备的调度下,快速而准确地将微小的电子元件放置在电路板上,并进行焊接。传感器对焊接过程中的温度、压力和电气参数进行实时监测,通过工控设备的反馈调节机制,保证焊接质量,有效提高了电子制造行业的生产效率和产品合格率,推动了电子科技的快速发展。汽车零部件工控设备原理工控设备的数据处理能力,为企业决策提供精细科学依据。

在橡胶轮胎制造过程中,工控设备对于工艺优化和质量控制起到了关键作用。在橡胶混炼环节,密炼机在工控设备的控制下,精确控制橡胶、炭黑、硫磺等原材料的配比和混炼时间、温度、压力等参数。例如,PLC 根据轮胎的不同型号和性能要求,调整密炼机的混炼工艺,确保橡胶混合物的均匀性和质量稳定性。在轮胎成型过程中,自动化成型机在工控设备的指挥下,将各种部件准确地组合在一起,传感器实时监测成型过程中的压力、位置等参数,保证轮胎的成型精度。在硫化环节,工控设备对硫化罐内的温度、压力和时间进行严格控制,使橡胶在合适的条件下发生硫化反应,提高轮胎的强度、耐磨性和耐老化性能。通过工控设备对整个橡胶轮胎制造工艺的优化和质量控制,生产出符合国家标准和市场需求的高质量轮胎产品。
工控设备对生产效率的提升有着出色的贡献。在现代化工厂中,自动化生产线借助工控设备实现了连续、高速运转。例如在电子芯片制造工厂,工业机器人在工控系统的指挥下,能够以极高的速度和精度进行芯片的封装、测试等工作,其工作效率远远高于人工操作。而且,工控设备可以根据生产任务的需求,快速调整生产参数和工艺流程,实现不同产品型号的灵活切换生产,缩短了生产周期,提高了企业对市场变化的响应速度,从而在激烈的市场竞争中抢占先机。凭借工控设备,食品加工生产线严守卫生与质量关卡。

在矿山开采与选矿行业,工控设备实现了智能化管理,提高了生产效率和资源利用率,降低了安全风险。在矿山开采过程中,无人驾驶采矿设备在工控设备的远程控制下进行作业。例如,无人驾驶卡车根据预设的路线和任务,在矿山道路上自动行驶,运输矿石,工控设备通过卫星定位、传感器等技术对其进行实时监控和调度,提高了运输效率和安全性。在选矿厂,工控设备对破碎、磨矿、浮选等选矿工艺进行智能控制。通过对矿石性质的实时检测和分析,工控设备调整破碎机的排料口尺寸、球磨机的磨矿浓度和浮选药剂的添加量等参数,提高选矿回收率和精矿质量。同时,工控设备还对矿山设备的运行状态进行监测和故障诊断,及时发现设备隐患,安排维护保养,保障矿山开采与选矿过程的稳定运行。高级工控设备,满足航空航天等上乘制造严苛质量要求。常熟工控设备有哪些
先进工控设备,助力纺织机械实现复杂图案高效编织。吴中区工控设备店
在化工行业,工控设备面临着特殊的应用环境和要求。化工生产过程通常涉及高温、高压、易燃易爆、有毒有害等危险工况,因此工控设备必须具备高可靠性和高安全性。例如,在化工反应釜的控制中,工控设备需要精确控制反应温度、压力、物料流量等参数,确保反应过程稳定、安全地进行。同时,由于化工生产的连续性要求较高,工控设备的稳定性至关重要,一旦出现故障,可能引发严重的安全事故和环境污染。此外,化工行业对工控设备的防腐、防爆性能要求严格,设备外壳、传感器、执行器等部件都需要采用特殊的防腐、防爆材料和设计,以适应恶劣的化工生产环境。而且,化工生产过程中的工艺复杂,工控设备需要具备强大的控制算法和丰富的功能模块,以满足不同化学反应和工艺流程的控制需求。吴中区工控设备店
工业机器人在执行任务时,其轨迹规划由工控设备中的特定算法实现。轨迹规划算法的关键是根据机器人的任务要求和工作环境,确定机器人末端执行器在空间中的运动路径和速度。例如,在机器人弧焊任务中,工控设备首先根据焊接工件的形状、焊缝的位置和要求,将焊缝分解为多个离散的路径点。然后,采用插值算法,如直线插值、圆弧插值或样条曲线插值等,在这些路径点之间生成连续平滑的运动轨迹。同时,考虑到机器人的运动学约束,如关节的运动范围、速度限制和加速度限制等,算法会对生成的轨迹进行优化调整,确保机器人能够以合理的姿态和速度沿着轨迹运动,避免出现关节超限或运动不稳定的情况。此外,在轨迹规划过程中,还会考虑到障碍物的避让,...
- 梁溪区汽车零部件工控设备价格 2026-03-19
- 张家港组装工控设备 2026-03-19
- 姑苏区工控设备种类 2026-03-19
- 新吴区工控设备复位 2026-03-19
- 姑苏区逆变器工控设备原理 2026-03-19
- 浙江工控设备电源 2026-03-18
- 青浦区工控设备网 2026-03-18
- 相城区汽车零部件工控设备厂家 2026-03-18
- 武进区工控设备有限公司 2026-03-18
- 江阴新能源电池工控设备价格 2026-03-18


- 虎丘区组装工控设备 2026-03-17
- 锡山区生产线工控设备原理 2026-03-17
- 工业园区工控设备公司 2026-03-17
- 滨湖区组装工控设备交期 2026-02-26
- 姑苏区西门子工控设备 2026-02-26
- 锡山区工控设备保养 2026-02-26



- 姑苏区逆变器工控设备原理 03-19
- 浙江工控设备电源 03-18
- 青浦区工控设备网 03-18
- 相城区汽车零部件工控设备厂家 03-18
- 武进区工控设备有限公司 03-18
- 江阴新能源电池工控设备价格 03-18
- 南京测试工控设备方案 03-18
- 宁波工控设备店 03-17
- 梁溪区工控设备网 03-17
- 青浦区工控设备电源 03-17