双伸位堆垛机的结构特点货叉结构:双伸位堆垛机的货叉设计较为复杂,它能够向两个方向伸出。这种货叉通常具有可伸缩的多级结构,以确保能够准确地深入到货架的不同位置进行货物存取。例如,其货叉可能由内叉和外叉组成,内叉用于主要的伸缩动作,外叉在需要向另一个方向存取货物时发挥作用,并且两者之间通过精密的传动装置连接,保证同步运动和准确的位置控制。载货台与机身连接:载货台与机身的连接部分需要具备更高的强度和稳定性。因为双伸位堆垛机在工作时,货叉向两个方向伸出会产生不同方向的力矩,对载货台和机身的连接部位造成较大的压力。所以在设计上,这一连接部分会采用更坚固的材料和更合理的结构,如加强的钢结构或强度的螺栓连接。控制系统:双伸位堆垛机的控制系统相比单伸位更为复杂。它需要精确地判断货叉的伸缩方向、伸缩距离以及与货架位置的匹配。控制系统要根据仓库管理系统的指令,准确地控制货叉向合适的方向伸出,并且在伸出过程中实时监测货叉的位置和状态,以确保能够顺利地存取货物。这通常需要使用高精度的传感器和先进的控制算法。堆垛机通过PLC控制系统实现自动化控制,能够自动完成货物的存取、搬运、堆放等操作,无需人工干预。如何巷道堆垛机制造价格

机架它是堆垛机的主体框架,为其他部件提供支撑。通常采用金属结构,如钢材焊接而成,要具备足够的强度和刚性,以保证堆垛机在高速运行和承载重物时的稳定性。载货台是放置货物的平台。它可以根据货物的形状、尺寸和承载要求进行设计。载货台一般配备有货物固定装置,如托盘定位装置、夹紧装置等,防止货物在堆垛机运行过程中发生位移或掉落。伸缩货叉是堆垛机存取货物的关键部件。它可以在水平方向伸缩,能够将货物准确地放置到货架的指定位置或者从货架位置取出货物。货叉的伸缩动作通常由电机或液压系统驱动,并且其伸缩长度可以根据货架的列间距进行调整。浙江巷道堆垛机便捷堆垛机平稳工作的更高左右伸叉速度可以达到40m/min,这很大提高了工作效率。

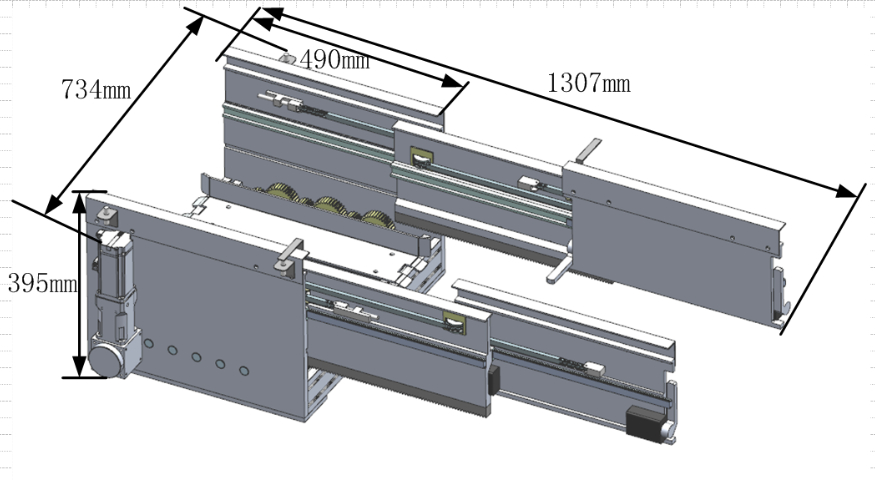
换电移动平台用于堆垛机蓄电池充电,同时也是换电时的蓄电池过渡衔接平台,在现代物流仓储的高效运转中扮演着关键角色,主要由电池承载框架、辊子、电池锁紧装置及钣金外壳等组成。电池承载架由碳钢型材焊接而成,这种材质具备良好的强度与稳定性,能够承受蓄电池的重量以及在转运过程中可能产生的冲击力。电池承载架上安装辊子作为电池的转运平台,辊子尺寸依据蓄电池尺寸及重量选型,确保在转运过程中电池能够平稳移动,同时辊子的离地高度与蓄电池放置在堆垛机上的离地高度相匹配,这一细节设计极大地方便了电池的更换操作,减少了因高度差可能带来的碰撞风险以及人力物力的消耗。电池锁紧装置安装在电池承载架上,用于锁紧电池,防止在充电或转运过程中电池发生位移,确保整个操作过程的安全性。整体结构加工方便且牢固可靠,不仅在制造环节能够节省时间和成本,而且在长期使用中能够稳定运行,可满足电池充电及暂存时的承载等要求,为堆垛机的持续作业提供了有力保障,有效提升了物流仓储的作业效率和自动化水平。
运行机构,包括水平运行机构和垂直提升机构。水平运行机构使堆垛机能够在货架巷道内水平移动,一般由电机、减速器、车轮等组成。电机通过减速器将动力传递给车轮,驱动堆垛机沿着巷道轨道运行。垂直提升机构用于使载货台和货物在垂直方向上下移动,常见的有钢丝绳提升方式和链条提升方式。钢丝绳提升具有运行平稳、速度快等优点;链条提升则相对更可靠,承载能力强。控制系统是堆垛机的“大脑”。它可以是简单的PLC(可编程逻辑控制器)控制系统,也可以是更复杂的计算机控制系统。控制系统能够接收来自仓库管理系统(WMS)的指令,控制堆垛机的运行、停止、货物存取等操作,并且可以实现对堆垛机的速度调节、位置精确控制以及故障检测等功能。大量存储、分拣和配送的食品和饮料产品,堆垛机可以保证高效的物料周转,同时确保卫生标准得到严格遵守。
堆垛机的金属结构部分立柱:是堆垛机的垂直支撑部件。它通常由型钢焊接或螺栓连接而成,具有足够的强度和刚度,以保证堆垛机在运行过程中的稳定性。例如,在大型自动化立体仓库中,立柱的高度可能达到几十米,要能够承受载货台及其所载货物的重量,以及堆垛机在加速、减速和运行过程中产生的各种动态载荷。横梁:连接左右立柱的水平部件。它为载货台的水平运动提供支撑和导向,其结构形式和尺寸根据堆垛机的跨度和承载能力等因素确定。横梁上通常安装有导轨,载货台通过滚轮或滑块在导轨上移动,以确保载货台能够准确地在巷道内水平移动。堆垛机的货叉防滑设计、认址片和编码器双重保证等机制,进一步提高了作业的准确性。机械行业巷道堆垛机平台
尽管堆垛机配备了多种安全保护装置,但在实际应用中仍需加强安全管理和监控。如何巷道堆垛机制造价格
转轨堆垛机的工作原理直轨段工作:在巷道直轨段运行时,堆垛机的走行电机驱动走行轮,使堆垛机沿天地轨方向运动,升降台在提升电机的驱动下带动载货台升降,货叉电机驱动货叉完成货物的存取操作,与一般直轨堆垛机的工作方式相同。转轨工作:以四巷道为例,当堆垛机需要从a1轨道切换到a2轨道运行时,相应的转轨装置会根据系统指令将ab段弯轨道接上a2轨道和b转轨直段,堆垛机即可运行到a2巷道进行出入库作业;当堆垛机需要从a1轨道切换到a3轨道运行时,a2巷道对应的转轨装置先将ab段弯轨道与b转轨段断开,a3巷道对应的转轨装置再将ab段弯轨道接上a3轨道和b转轨直段,堆垛机便能顺利通过a2巷道的转轨装置运行到a3巷道进行出入库作业,从而实现堆垛机在任意巷道之间的切换。如何巷道堆垛机制造价格