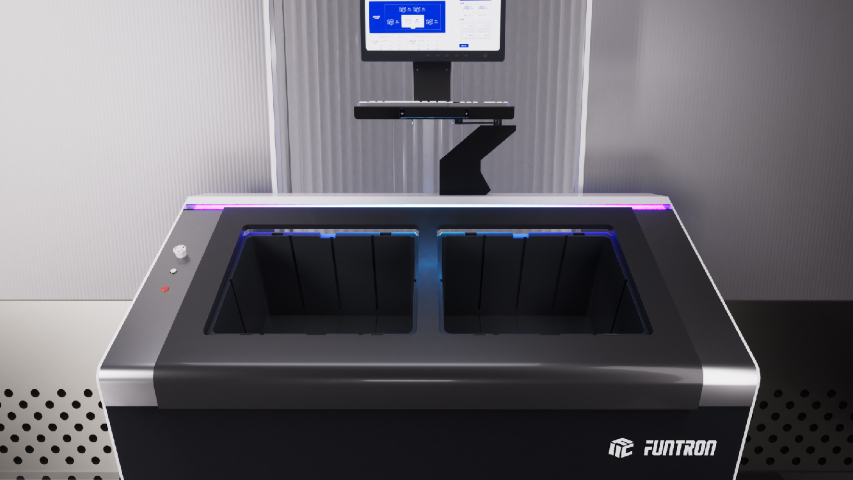
“货到人”AI小助手⸺乐宝机器人乐宝机器人的平均能耗只为120watt,采用了先进的直线驱动技术,其动力系统能够确保高达2mm以内的精细度。搭配立方仓的创新轨道定位技术,乐宝机器人能够灵活高效地检索、调取任何库存位置的宝箱。系统利用实时位置追踪技术,根据乐宝机器人的当前位置智能分配任务,计算更优路径以高效率完成各项操作。每个机器人均采用无线单独的控制系统,确保操作灵活性与个体化。乐宝机器人提升速度可达1.8米/秒,最大行驶速度则为2.5米/秒,其性能不受载重影响,保持始终如一的高效表现。智慧档案库采用箱式存储,档案批量转运高效,区域间流转无障碍。自动化档案馆发展方向
立方仓项目凭借前瞻性设计和创新机器人技术,成为仓储管理新的风向标。该项目实现了机器人跨库区、跨楼层的智能协作,明显提升了仓储系统的运行效率和响应速度。其独特布局设计有效融合了空间利用、操作灵活性与便捷性,深刻体现了智能仓储的精髓。在存储容量方面,立方仓通过高密度存储方案,超越传统密集架,满足了现代仓储对空间高效利用的需求。档案出库时间从传统的15分钟缩短至30秒,极大提升了用户体验。此外,系统还具备智能自动优化功能,动态调整档案存储位置,简化工作流程,提升管理智能化水平。项目团队采取多重安全措施,确保数据接口安全和任务高效执行,构建了安全可靠的仓储环境。其多路径网格布局有效解决了传统仓储的交通拥堵问题,使机器人能够自由行驶并规划优先路线,实现并行作业,明显提升了货物出库速度和系统吞吐量,展现了立方仓在智能仓储领域的高效性能与潜力。柔性智慧档案库房解决方案供应商高密度无人立方仓智慧档案馆,革新存储技术,无需人工盘库。智能仓储新风尚!

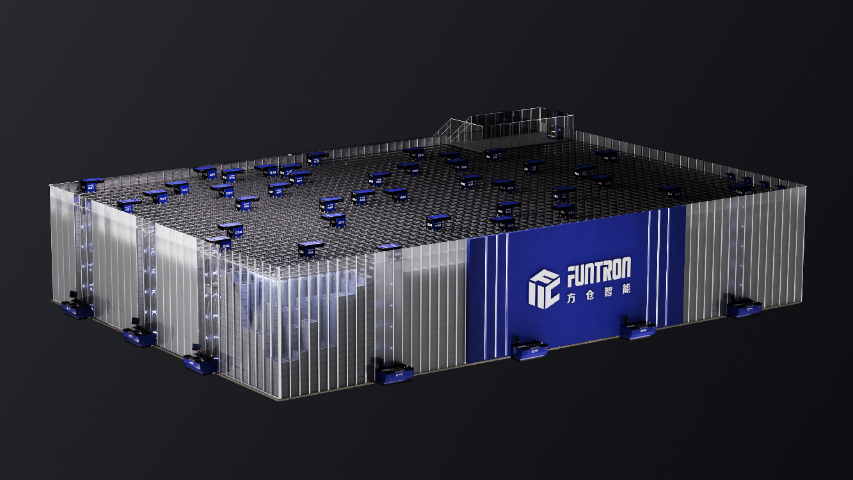
无巷道高密度货架——方仓网络。方仓网络作为货架与机器人的行驶轨道,采用了特殊工艺材质,确保其更加光滑耐用。网络的顶端设有乐宝机器人的行驶轨道,双轨设计使得机器人能够在任何方向上无缝并肩行驶或交叉,通过优化路径始终保持高效运行。方仓网络的标准化结构组件设计使其不受场地、层高和立柱的限制,组装和连接都非常简便,施工成本低且周期短。该系统支持多层互通的存储方式,能够有效降低土地成本,实现高达16米的跨层连接,很大限度地利用仓库空间,从而降低土地和管理成本。
为什么选择立方仓?致极空间利用:采用高密度垂直堆叠,较传统存储方案提升4倍空间,无需穿梭巷道,空间利用更高效。超高效能:拥有多元取货路径,乐宝机器人顶层更优先路径运行,实现每平方米每小时5.5箱的高效存取,远超ACR与穿梭车系统,明显提升仓储效率。智能精确管理:集成智慧算法平台,实现货物随进随出,精确库存管理与决策支持,自动排单,避免胀库等问题。灵活扩容:建设灵活,无视层高、地形及承重限制,可按需增加机器人与工作站,跨楼层、跨区间无缝扩展,展现强大柔性扩展能力。低维护成本:系统设计注重维护便捷,每套系统配专属维护平台,便于监控、管理与故障排查,减少停机时间。乐宝机器人顶层运行,简化地面维护,加之低能耗设计,大幅降低运维成本,保障系统长期稳定高效运行。智慧库房箱式存储,档案批量处理高效,转运灵活省空间!
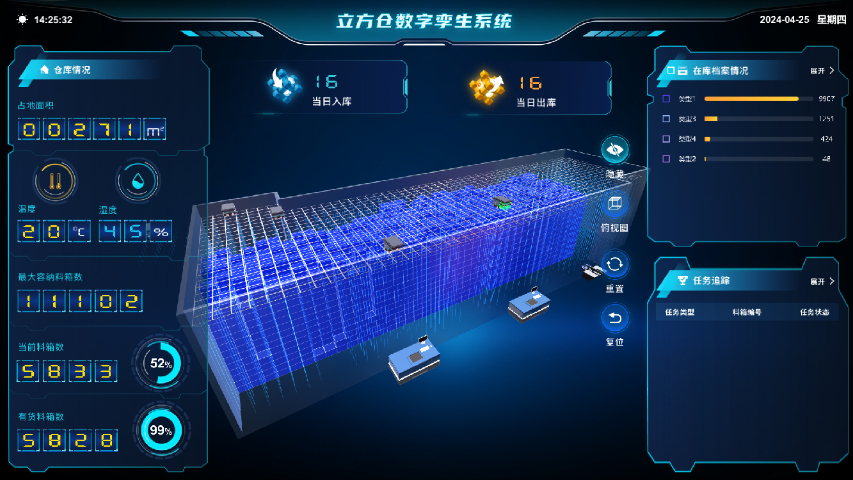
立方仓作为智能仓储解决方案的风向标,致力于为客户提供完善的一站式服务体验,涵盖总体规划、交钥匙项目实施以及后续的服务和运维等多个领域。在总体设计方面,立方仓凭借深厚的行业洞察和先进的技术积累,能够准确识别客户的业务需求和仓储挑战,制定定制化、高效且可靠的仓储系统设计方案。我们综合考虑仓库空间优化、先进设备配置和智能软件集成等多个因素,确保每个方案都能精确满足客户需求,实现系统性能与实用性的双重提升。在交钥匙工程服务方面,我们提供从项目构想到结束终交付的全流程无忧服务。这意味着,从项目初期的详细规划到后期的顺利交付,立方仓将全程支持,确保项目按时、按质、按量完成。客户只需轻松享受,即可拥有一套即插即用、高效运作的智能仓储系统。在高质量服务和运维保障方面,立方仓深知高效的系统运作离不开持续的专业运维支持。因此,我们为客户提供包括设备安装调试、系统操作培训、日常维护保养及技术迭代升级在内的综合服务。我们的运维团队全天候待命,确保及时响应客户需求,保障系统始终保持高效运行,为客户的业务发展提供有力支持。方仓智能无人智慧档案库房支持实时监控,随时掌握档案状态。智能化档案柜升级改造
智慧档案新体验,存储容量高于传统密集架2倍,智能管理无需盘库,安全网络守护,人库分离更省心。自动化档案馆发展方向
方仓智能存储系统采用了多路径网格棋盘式布局,仓库内部呈现出纵横交错的棋盘格局,使得机器人能够在多条路径上灵活行驶。这种设计明显增加了机器人的行驶路线选择,避免了拥堵现象的发生。机器人可以根据优化策略规划行驶路线,从而减少运输时间;多个机器人能够在不同路径上并行作业,进一步提升整体效率。此外,系统还具备根据实时情况灵活调整机器人路径规划的能力,进一步优化作业效率。这种布局大幅度提升了机器人将货物搬运到出口的速度,使得系统的吞吐量明显增加。自动化档案馆发展方向
立方仓无人智慧档案馆项目标志着仓储管理领域的一次重要转型,深度融合了先进的机器人技术与智能管理系统,...
【详情】立方仓无人智慧档案馆项目凭借其前瞻性设计理念,深入结合机器人技术与仓储管理,开创了多库区无缝连接与多...
【详情】方仓智能的立方仓无人智慧档案馆项目,凭借先进的机器人技术,达到了跨楼层和跨区域灵活穿梭以及多机器人协...
【详情】方仓智能自主研发的立方仓项目凭借其强大的创新能力与实用性,正在开创仓储管理新纪元。该项目利用前沿的机...
【详情】智能立方仓智慧档案库房的建设依托于先进的机器人技术和集成控制系统,实现了库房运营的高度智能化和自动化...
【详情】打造智慧法院无人库房示范产品。示范效应:通过最高人民法院的成功应用,向全国各级法院展示智慧无人库房的...
【详情】立方仓无人智慧档案馆项目标志着仓储管理领域的一次重要转型,深度融合了先进的机器人技术与智能管理系统,...
【详情】方仓智能——魔方存储(立方仓系统),又称立方仓存储,是一种超级立方体系统,能够集约利用所有空间,实现...
【详情】方仓智能立方仓智能仓储项目中,乐宝机器人正以其前所未有的便捷与高效,为档案管理领域带来一场深刻的智能...
【详情】