带云台的主动安全一体机在挖掘机安全管理中的应用方案,解决了关键的安全问题,提高了施工的安全性和效率。以下是具体解决的安全管理问题:
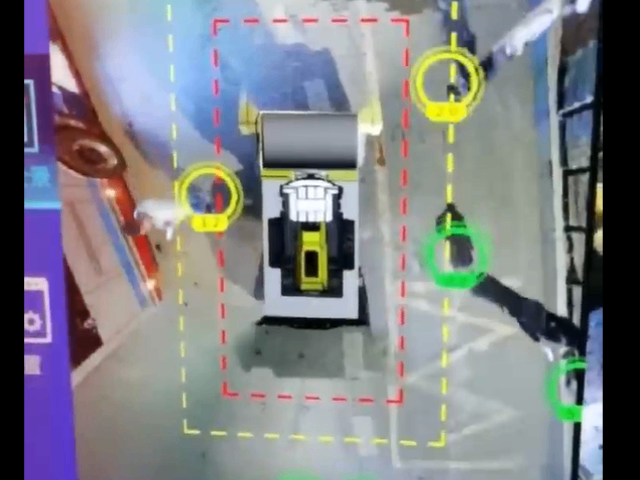
一、实时监控与预警全方WEI监控:通过云台上的高清摄像头,实现挖掘机作业环境的360度无死角监控,确保驾驶员对周围环境的全MIAN了解。障碍物预警:实时检测挖掘机周围的障碍物,包括人员、车辆、其他机械等,一旦检测到潜在碰撞风险,立即发出声光警报。特别针对挖掘机存在的视觉盲区,如铲斗下方、侧面等,通过广角摄像头和先进的图像处理技术,提供清晰的盲区视图,减少因盲区导致的安全事故。
二、远程监控与管理实时数据传输:将挖掘机的实时视频、工作参数等数据通过云平台传输到远程监控中心,可以随时随地查看挖掘机的作业情况,远程调度和指挥,确保挖掘机的合理布局和高效作业。实时监测挖掘机的运行状态,预测并预警潜在故障,提前安排维护计划,减少因故障导致的停机时间。
三、数据分析与决策支持作业数据分析:收集和分析挖掘机的作业数据,如工作时间、工作负载、能耗等,评估挖掘机的使用效率和性能状况。基于数据分析结果,优化施工计划,合理安排挖掘机的作业时间和作业区域,提高施工效率。
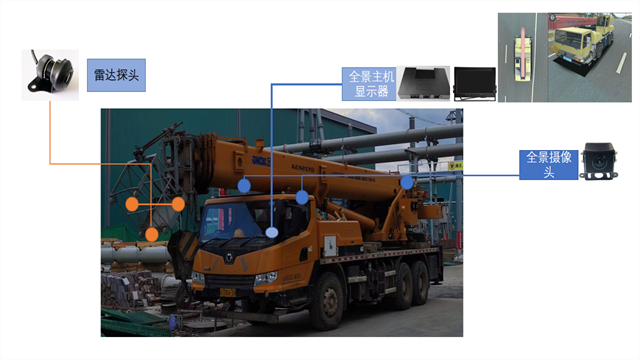
360°全景环视融合超声波雷达系统在现代汽车,工程车,无人机以及工业自动化等领域中发挥着重要作用.安徽5G主动安全预警系统
(下篇)叉车防撞预警系统的后台管理实现,主要依赖于一系列先进的技术手段和管理策略,以确保系统的稳定运行和高效管理。
二,用户权限管理:设置不同级别的用户权限,确保只有授权人员才能访问系统。记录用户的操作日志,以便追溯和审计。报警与通知:当系统检测到潜在危险时,立即通过声光报警、短信、邮件等方式通知相关人员。支持自定义报警规则,满足不同场景下的需求。数据备份与恢复:定期备份系统数据,确保数据安全可靠。提供数据恢复功能,以便在数据丢失或损坏时快速恢复。
三、技术实现手段云计算与大数据:利用云计算平台处理海量数据,提高数据处理速度和效率。同时,通过大数据分析技术挖掘数据价值,为管理决策提供有力支持。AI与机器学习:运用AI算法和机器学习技术提高系统的智能化水平,实现更精细的预警和决策控制。物联网技术:通过物联网技术将前端设备与后台管理系统连接起来,实现数据的实时传输和共享。
综上所述,叉车防撞预警系统的后台管理实现是一个复杂而系统的工程,需要综合运用多种技术手段和管理策略来确保系统的稳定运行和高效管理。 湖南360全景主动安全预警系统开发商RTSP协议支持多种认证方式,如基本认证,摘要认证,OAuth认证和TLS/SSL认证等,以保护流媒体服务器资源的安全.
4G管理平台在主动安全预警系统中扮演着至关重要的角色,其价值作用主要体现在以下几个方面:
1. 高速稳定的数据传输:4G管理平台采用第四代移动通信技术,具有更高的数据传输速率。这意味着车载传感器、摄像头、毫米波雷达等设备采集的数据可以更快地被传输和共享,为安全预警系统提供更及时的信息支持。低延迟是4G管理平台的另一大优势,确保了数据传输的实时性。
2. 广FAN的网络覆盖范围:4G管理平台具有更好的网络覆盖范围,不受地形、地貌等自然条件的限制,能够实现无死角覆盖。能保持与预警系统的稳定连接,提高预警系统的可靠性和有效性。
3. 智能灵活的数据管理:4G管理平台具备智能的数据处理和分析能力。通过对采集到的数据进行实时处理和分析,预警系统准确地判断行驶状态和风险等级。管理平台支持数据存储、查询等功能,提供全MIAN的数据支持。
4. 高效实时的安全预警:基于4G管理平台的高速数据传输和智能数据处理能力,主动安全预警系统能够实现实时预警。
5. 提升应急响应能力快速响应:在突发事件发生时,4G管理平台能够迅速传递预警信息,不同部门之间可以实现信息共享和协同作战。在应对突发事件时,各部门能够迅速集结力量、调配资源,形成合力应对挑战。
22米拖挂车转弯时实现360全景画面的拼接,其难度主要体现在以下几个方面:
1. 图像拼接的准确性摄像头视角差异:由于拖挂车车身长、结构复杂,需要安装多个摄像头来覆盖360度视野。不同摄像头之间的视角、焦距等存在差异,导致采集到的图像在拼接时容易出现错位和畸变。在转弯过程中,拖挂车的车头和车厢之间的姿态变化较大,尤其是非刚体连接的拖挂车,这种变化更加复杂。这会导致图像拼接时难以准确对齐,影响拼接效果。
2. 动态物体的处理干扰因素多:转弯过程中,出现动态物体的运动轨迹和速度难以预测,容易在图像拼接过程中造成干扰。采用先进的算法和技术手段来准确识别并剔除这些干扰因素,保证拼接画面的清晰度和准确性。
3. 数据传输和存储的挑战数据量大:多个摄像头同时采集高清视频数据,会产生庞大的数据量。长时间的数据采集和存储会消耗大量的存储空间。需采用高效的压缩算法和存储管理技术来优化数据存储效率。
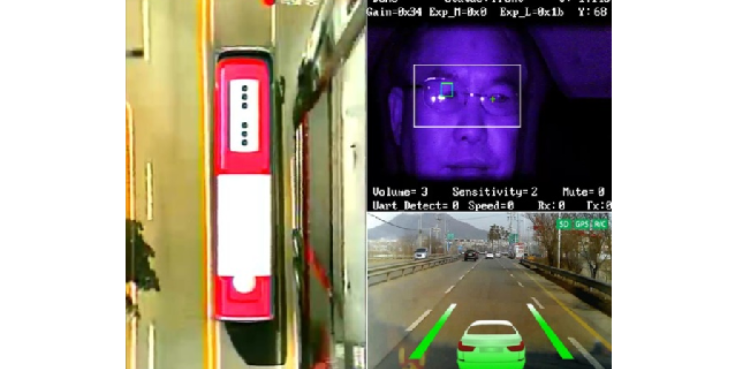
4. 实时性要求高实时拼接需求:实时地展示360全景画面,拼接系统必须具备高效的算法和强大的计算能力。实时拼接要求系统具备高度的稳定性和可靠性。在复杂多变的行驶环境中,系统必须能够持续稳定地工作,确保拼接画面的连续性和准确性。 主动安全一体机不仅具备主动安全预警功能,还集成了胎压监测,雷达预警等多种主动安全预警信号.
(下篇)接上篇:ONVIF协议在360全景影像中的应用主要体现在以下几个方面:
三、高质量视频压缩考虑到视频数据的传输和存储都需要考虑带宽和存储空间的限制,ONVIF协议支持H.264等高效视频编码标准。这些编码标准能够实现高质量的视频压缩和传输,减少视频数据的传输带宽和存储空间需求,同时提高视频流的流畅性和实时性。在360全景影像系统中,高质量的视频压缩尤为重要,因为它需要处理大量的视频数据并实时传输给用户。
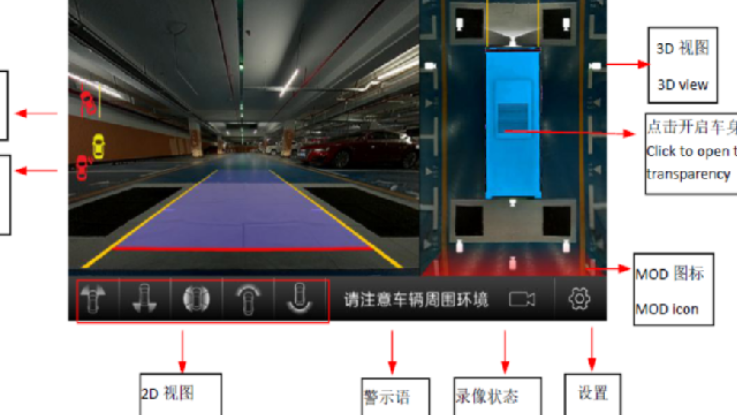
四、灵活配置和管理
ONVIF协议提供了丰富的设备管理和控制接口,360全景影像系统可以方便地进行配置和管理。用户可以通过ONVIF协议对车载摄像头进行远程设置、参数调整、固件升级等操作,以满足不同的使用需求。
五、应用流程
ONVIF协议的应用流程大致如下:通过ONVIF的设备搜索发现功能,获取到车载摄像头的ONVIF入口地址。获取媒体服务地址,即获取与视频传输相关的功能入口地址。获取媒体信息,包括车载摄像头支持的硬件参数、编码格式、码流数量等。根据需要设置媒体的编码配置(可选)。获取RTSP(实时流传输协议)拉流的地址,这是视频传输的关键步骤。使用支持RTSP协议的音视频拉流工具(如ffmpeg或live555)进行音视频拉流,实现视频的实时传输和显示。
4G智能云平台主动安全一体机支持通过4G网络进行远程监控和管理,方便对车辆进行实时跟踪和安全管理.广西AI主动安全预警系统生产厂家
4G 360全景影像网口视频流传输为工业机器人提供了视觉盲区与远程操控解决方案.安徽5G主动安全预警系统
毫米波雷达集成360全景系统的应用场景非常广,主要集中在提升驾驶安全、辅助驾驶决策以及实现智能化驾驶等方面。
1. 泊车辅助:毫米波雷达能够精细检测周围障碍物,如车辆、行人、路沿等,结合360全景影像系统提供的无盲区视觉,帮助驾驶员准确判断泊车空间,避免碰撞。毫米波雷达与360全景影像的结合能支持自动泊车功能,车辆能够自主完成泊车过程,提高泊车效率和安全性。
2. 障碍物检测与避障:毫米波雷达能实时检测前方、后方及侧面的障碍物,结合360全景影像系统提供的全景视野,帮助驾驶员提前做出避障决策,避免碰撞事故。在低速行驶或复杂交通环境中,如狭窄道路、交叉口等,毫米波雷达与360全景影像的结合能够提供更加全MIAN的环境感知能力。
3. 自动驾驶与ADAS系统:毫米波雷达与360全景影像系统是重要的环境感知传感器,能实时获取车辆周围的环境信息。支持多种ADAS功能,如自动紧急制动(AEB)、前向碰撞预警(FCW)、变道辅助(LCA)、自适应巡航(ACC)等,提高驾驶的舒适性和安全性。
4. 特定场景应用:毫米波雷达具有超QIANG的精细性、稳定性、灵敏度以及抗干扰性,能够全天候全天时工作,不受雨、雪、雾霾等环境的影响,因此在恶劣天气条件下也能保持较高的探测性能。 安徽5G主动安全预警系统