360度全车影像的组成:一般来说全景影像共有前后左右4个摄像头,分别在车头,车位,以及两边反光镜下各一个。分别用来采集车头,车侧盲区,车尾情况的图像。图像需要传送到处理芯片以及图像处理单元进行处理,因为这些摄像头为了保证视野够大,都使用鱼眼广角摄像头,拍摄下来的图像都是有些扭曲的,需要进行几何修正。然后通过软件处理图象中的相同点,将特定角度影像的重叠区域准确融合在一体,呈现360度俯视全景。基于单个后视摄像头的可视倒车雷达只能看到车身正后方影像,无法同时看清车身四周状况,存在视角盲区,难以满足驾驶员越来越苛刻的驾驶要求,因此就有了车身周围360度全景影像的需求,360度全景倒车影像由此诞生。为什么360全景影像大受欢迎呢?车辆360全景影像设备采购
360度全景倒车影像,是一套通过车载显示屏幕观看汽车四周360度全景融合,超宽视角,无缝拼接的适时图像信息(鸟瞰图像),了解车辆周边视线盲区,帮助汽车驾驶员更为直观、更为安全地停泊车辆的泊车辅助系统,又叫全景泊车影像系统或全景停车影像系统(有别于市面上把汽车四周画面在显示屏幕上进行分割显示的“全景”系统)。倒车,一直是广大司机头疼的问题,再有经验的司机也有过刮碰经历。据统计,由于车后盲区所造成的交通事故在中国约占30%,美国约占20%。难怪很多新手不怕开车,就怕倒车,一倒车就手忙脚乱。虽然有倒车雷达,但车后的小孩、石头、大坑等又不能被倒车雷达识别,极易引起事故。车用8路360全景影像系统盲区会导致你看不到障碍物,导致刮蹭的发生,360全景影像就消除了盲区看不见的可能。

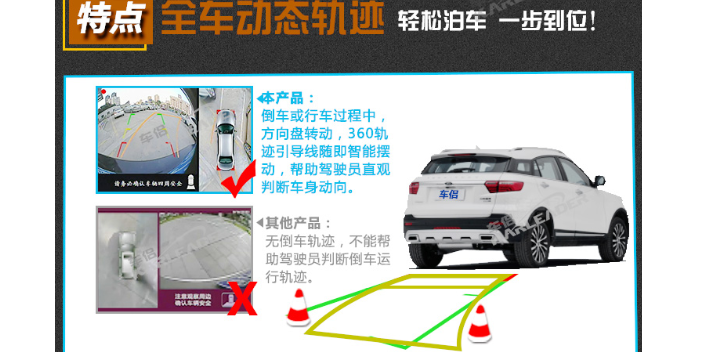
360全景影像有用吗?1、采用先进研发技术;2、兼容前装导航,界面完美匹配;3、4颗高清摄像头,360度全景呈现;4、3D/2D还原真实影像,科技尽在掌握;5、超广角高清夜视镜头;6、侧方位停车辅助功能,动态轨迹线;7、孔位隐藏设计,不破坏原车更美观。优点1:轻松泊车:通过360全景俯视画面可以很直观看到停车位和车身的相对位置,可轻松完成倒车入库等复杂操作。优点2:避免刮蹭:360全景可以查看车身周围情况,并可根据使用需要切换不同视角显示,特别可以同时显示车身两侧的影像,通过狭窄路段时能够避免车辆与旁边障碍物发生刮蹭。优点3:安全启动: 上车后启动360画面。车身前后左右视觉盲区的情况一目了然,有效消除了车辆启动时隐藏的安全隐患。
(专辑一)360全景透SHI功能在技术上主要通过以下几个步骤实现:
一、基本原理360全景透SHI功能基于广角效应和几何透SHI原理,通过拍摄设备(如相机或摄像头)捕捉多个角度的图像,并将这些图像拼接成一张完整的全景图片或实时视频流。
二、实现步骤拍摄设备选择:选择适合拍摄全景的相机或摄像头,通常要求具备较高的分辨率和广角镜头。对于汽车等交通工具的360全景透SHI系统,可能需要安装多个摄像头(如四个广角摄像头分别位于车身前后左右),以捕捉车辆周围的全方WEI图像。场景布置与拍摄:将拍摄设备放置在场景的中心或合适的位置,确保能够拍摄到整个场景或物体的完整画面。对于动态场景(如行驶中的车辆),拍摄设备需要持续捕捉并传输图像数据。图像采集与处理:摄像头捕捉到的原始图像数据通过图像处理单元进行处理,包括几何校正、颜色匹配、亮度调整等,以确保图像之间的无缝拼接。使用先进的图像处理算法和拼接技术,将多个角度的图像拼接成一张完整的全景图像或实时视频流。拼接好的全景图像或视频流通过显示设备(如车载显示屏、手机或电脑屏幕)实时展示给用户。用户可以通过触摸、滑动或其他交互方式,在全景图像中自由浏览和观察不同方向的视图。
车侣360全景影像的路测视频。

汽车360全景安装教程:首先是安装的地点选在了一个地下汽车城,空间很大。车停到指定地点之后就开始进行安装作业。第1步就是将车内车外都用罩布盖好,避免安装过程中弄脏或者划伤车子。准备工作做好之后,接下来就是正式拆车安装了,360全景安装步骤:需要拆中控、车门、后备箱隔板这些。首先是拆开中控,取下原车的主机。第2步是拆下两边的车门,这是为了后续镜头走线需要。接线来后视镜也被拆下来了,因为左右两边的摄像头安装位置在两侧的后视镜下方,因此需要拆下后视镜进行打孔。其次是拆下车子后备箱的隔音板,因为后视镜头延长线走线的时候需要穿过后备箱到达车尾牌照附近。360全景影像具有超广角高清夜视镜头。车辆360全景影像设备采购
360度全景需要多久完成安装?车辆360全景影像设备采购
(下篇)车载AI360全景影像系统的技术原理: AI算法通过深度学习等技术对图像中的目标进行特征提取和识别,能够准确地识别出车辆周围的行人、车辆、障碍物等物体。物体识别精度:AI算法通过不断优化和训练,提高物体识别的精度和鲁棒性。它能够应对不同光照条件、遮挡情况、复杂背景等挑战,确保识别的准确性和可靠性。四、预警机制设计预警触发条件:当AI算法识别到潜在的危险源时,如行人、车辆等物体靠近车辆到一定距离时,系统会触发预警机制。预警方式:预警方式可以包括声光预警、语音提示等。系统会通过车载显示屏、扬声器等设备向驾驶员发出预警信号,提醒驾驶员注意潜在的危险。五、系统稳定性与可靠性抗干扰能力:车载环境复杂多变,系统需要具备较强的抗干扰能力,以应对电磁干扰、振动、温度变化等不利因素的影响。故障自诊断与恢复:系统应具备故障自诊断与恢复能力,能够在发生故障时及时报警并尝试恢复正常运行,确保行车安全。综上所述,车载AI360全景影像系统的技术原理,通过集成AI算法实现预警与物体识别功能的技术原理是一个复杂而精细的过程。它涉及到图像采集与传输、图像拼接与融合、AI算法集成与物体识别以及预警机制设计等多个方面。 车辆360全景影像设备采购