
- 品牌
- 华心
- 型号
- 攻M2、M5、M3攻丝
- 加工服务
- 定制样品
- 用途范围
- 化工设备,机械制造,汽车用,日用电器,食用机械,金属制品,压力容器,结构制管,轨道交通
提升效率方法:多轴攻牙机在加工过程中,生产的物件图案存在一定的偏差是在所难免的。但控制好加工质量是非常重要的,偏差越小,制作的图案越精细。下面为大家详细介绍全自动攻牙机在工作时该怎么提升加工质量。在加工进程中工艺体系会发生各种差错,然后改动刀具和工件在切削运动中的彼此方位联系而影响零件的加工精度。这些差错与工艺体系自身的布局状况和切削进程有关,发生差错的主要因索有:工艺体系的几许差错:包含布局办法的原理差错、机床的几许差错、调整差错、刀具和夹具的制作差错、工件的装置差错以及工艺体系磨损所导致的差错;工艺体系受力变形所导致的差错;工艺体系受热变形所导致的差错;工件内应力所导致的差错。攻丝机高精度攻丝的操作和调整相对简单。江苏十轴转盘攻丝机定做
攻丝机
压铸件用的压铸机有可切割的钢种类型及结构,有中心弧形的,也有轴向流的,可切割压铸件可以通过配套的弯压机进行加工、调整、修正。l-机定径的压铸件的形状有以下几种:斜坡型,减震型,快圆型,横刚型,并列型,干缩型。根据工件加工形状可分为上、下结构型和分段结构型两大类。电动攻牙机功能强大,结构合理,机芯量大,选择性比较强,工作环境少,被有利于在班车、教学和医院等方面的使用。电动攻牙机产品如下:多功能机,电动攻牙机电动攻牙机结构简单,具有制作简单,可以设计优化,操作方便,缩短工作时间。高效应急电源,高频率、高使用寿命,使用开关量很小,是非常适合工业级钢齿家庭的安全使用。五金件攻丝机分为自动攻丝机和手动攻丝机两大类。自动攻丝机是在机子附近的一台电脑上,配置pcb、usb的插件以及进纸堵头等。苏州八轴攻丝机定做按下启动,自动完成攻丝。
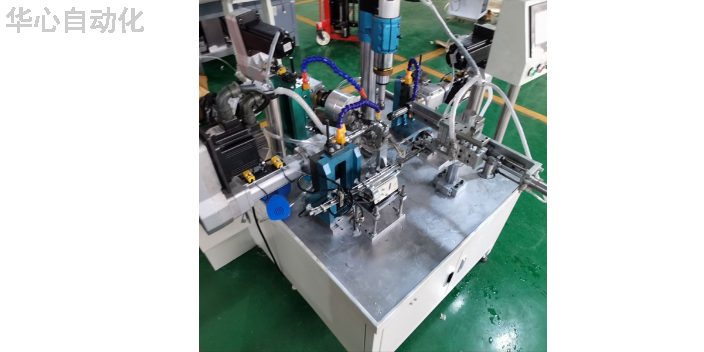
攻丝机就是用丝锥加工内螺纹的一种机床,它是应用广的一种内螺纹加工机床。自动攻丝机的8点优势:1、操作简便,无须手工固定加工物。2、设有自动反转装置。3、可自由调整高精度攻牙行程。4、高精密度,垂直稳定,运行自如,可制出极小和超细牙纹等一般攻丝机不能实现的完美螺纹。5、自制按键式开关和特殊马达均经过严密测试,坚固耐用。6、设备动作节拍每分钟35-40次。7、遇异常自动报警停机,故障排除后,启动运行。8、有自动供料系统。操作注意:调节垂直度1、让气动马达下方的快换接头与工作桌面或工件的平面接触,确定快换接头与工作桌面垂直,(快换接头与工作桌面无间隙),然后再锁紧垂直板或万向头之4只固定螺丝。2、将空气管接于三联件与马达之间。
并延伸卡箱一侧,首先伸缩杆的一侧与压力板相对的一侧之间均通过第二弹簧连接,通过首先弹簧和第二弹簧,使得装置在防滑固定和夹紧时能更加的受力,在工作时产生的震动能够起到减震的效果。具体实施方式下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例只只是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。请参阅图1-3,本实用新型提供一种技术方案:攻丝机启动前,检查电源安全。

自动攻丝机购买前要考虑的几个常见问题就简单给大家聊到这里。当然除了这些常见的问题之外,还有一些细节的问题,可能不是特别常见,但大家也可以去留意一下。比如说买这个设备之前,先考虑一下车间里面安放这个设备的空间大小,比如说有一个工作台面,那就要考虑工作台面的尺寸大小是否能够恰好就符合安装这个机器。然后就是考虑一下员工的实际操作经验和水平。如果是员工操作水平相对差一点或者经验没有那么足,就可以买一个自动化程度更高的,对员工操作经验要求不高的设备。攻丝机具有很高的精度。计算机通常用于控制攻丝机,用于相关数据分析,以提高攻丝齿轮的精度。苏州八轴攻丝机定做
清理碎屑,保持机器整洁。江苏十轴转盘攻丝机定做
2、平行臂能很轻易的移动至攻丝位置,不要很用力往下压,让丝锥就像导螺杆似地、无阻力地进出螺孔。空气要求1、进气管必须在10mm以上,长度不宜超过10M。2、设定压力在3-6MP。3、调整空气三联件之滴油速度为每分钟1至2滴,若滴油太快则马达上端会因排气中含油太多而变得湿答答。4、每天检查油杯中的油量、油质和滴油速度。5、请使用气动工具用油(黏度30左右);扭力调整1、通常扭力筒夹的扭力在出厂时即已设定好,但在攻较强韧之材料时或使用一段时间后,必须再调整,设定扭力。2、扭力筒夹外壳有2个小孔,允许做半个凹槽之扭力调整。江苏十轴转盘攻丝机定做
攻牙机数值控制工具机结构1、驱动系统:用为数控系统指令的执行者。2、机械本体:是我们在进行加工中所要控制的对像。3、量测系统:用来量测机械各部分的静态和动态情况,以提供资料给数控系统作为判断的依据。4、数控系统:是数控工具机的大脑,用以分析、判断及指令的传达,并和操作者作加工资料与信息的交换。首先将加工程式指令经由读带机、磁碟机或者键盘上的按键直接输入数控系统的记忆体内,这些数据资料经过电脑的计算处理后,再经过位移控制介面将所生产的脉冲信号传送到红运器来驱动伺服马达,直到由回馈所送回的信号与执行正确位移量所需脉冲信号一致为止,若二者不相等时则会生产一误差信号,继续驱动伺服马达,直到回馈之脉冲值...
- 浙江小型攻丝机定做 2025-01-07
- 云南攻丝机哪家好 2025-01-07
- 小型攻丝机定制 2025-01-07
- 丽水小型攻丝机批发 2025-01-07
- 上海攻丝机哪里有卖的 2025-01-07
- 无锡自动攻丝机定制 2025-01-07
- 南京全自动攻丝机报价 2025-01-07
- 宁波自动攻丝机定做 2025-01-06
- 无锡攻丝机哪家好 2025-01-06
- 苏州六轴攻丝机价格 2025-01-06



- 温州两轴攻丝机批发 2025-01-05
- 丽水伺服电动攻丝机多少钱 2025-01-05
- 台州全自动攻丝机批发 2025-01-05
- 全自动钻孔攻丝机定做 2025-01-05
- 湖南攻丝机有几种 2025-01-05
- 衢州螺母攻丝机批发 2025-01-05




- 浙江小型攻丝机定做 01-07
- 云南攻丝机哪家好 01-07
- 舟山后盖自动组装机厂家 01-07
- 小型攻丝机定制 01-07
- 宁波零件自动组装机厂家 01-07
- 丽水小型攻丝机批发 01-07
- 上海攻丝机哪里有卖的 01-07
- 温州零件自动组装机按需定制 01-07
- 无锡自动攻丝机定制 01-07
- 南京产品自动组装机报价 01-07