桁架机械手的设计要点?减少摩擦作为机械手的工作条件之一,桁架机械手也应尽可能减少机械间隙带来的运动误差。因此,在设计桁架机械手时,机械手各关节的承载距离应尽可能远。它可以很小,每个关节都应该有一个可靠且易于调整的轴承间隙调节机构。桁架机械手的结构尺寸应满足机械手工作空间的要求。工作空间的形状和大小与机械臂的长度和臂关节的转动范围密切相关。但是,桁架机械臂末端的工作空间考虑了腕关节的空间姿态要求。如果对手腕姿势提出具体要求,则手臂末端可达空间小于上述工作空间,未考虑手腕姿势。4.勃展机械手,自动化生产的好帮手,品质之选。衢州桁架机械手机器人
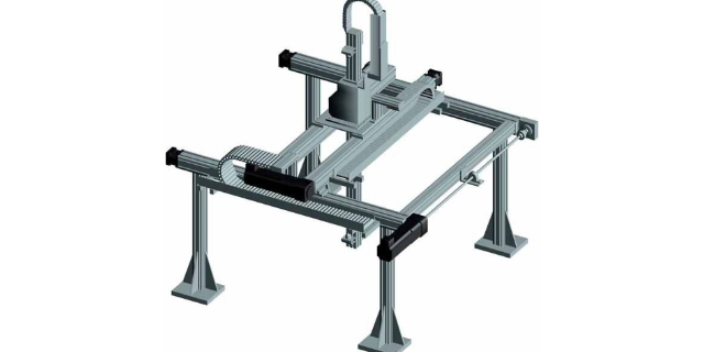
桁架可以简单地看作是梁,因为其结构类似于机械结构梁,从机械分析的角度来看,机床桁架和简支梁可以比较,可以通过简支梁弯矩图分析桁架,增加机械手对桁架的力,我们可以参考以下桁架机械手机械分析图。数控桁架机械手在机床上要求高,效率高,可靠性强。桁架柱的选择应稳定桁架支撑,节省机床整体空间。对于大多数柱的结构,应选择钢结构。桁架机械手的作用是发挥运输的作用,即在上下材料的轨道和机床之间移动工件,从机床上取出加工零件,然后从轨道上取出要加工的零件,放在机床上。主要的动作就是:爪张开,抓取,升降,左右移动。对于机械手的手爪设计有很多种方案和形式,可以根据不同的需求,选择不同的设计方法。下图就是雷杰科技为客户设计的其中一种。衢州全自动机械手机器人早期进口的机械手大都用他们自己制造的齿轮机构减速。

机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种。重载龙门桁架机械手价格控制系统可根据动作的要求,设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制机械手进行工作程序的存储方式有分离存储和集中存储两种。分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。
桁架机械手广泛应用于文娱范畴。医疗范畴:主要用于帮忙护理结束一些日常作业,例如,协助医生运送药品,以及在病房内主动监测空气质量等。运用桁架机械手也能够协助医生结束一些很困难的手术,比方,眼睛手术,大脑手术等等。桁架机械手是一种建立在直角X,Y,Z三坐标体系基础上,对工件进行工位调整,或结束工件的轨迹运动等功用的全主动工业设备。采用了Z新的plc操控技能以及伺服运动操控技能,使机械手功率更高、运用范围更广、工艺愈加安稳便当。整个工艺流程有机械手操控体系主动结束,可结束智能检测,主动报警等功用。能够在必定范围内进行任意组合,可结束对车床、加工中心、插齿机、电火花机床、磨床等类设备的主动化生产线改造。5.勃展机械手,智能灵活,工业自动化的得力助手。

桁架机械手使用前后的注意事项?在操作桁架机械手前要验证好电机的转方向是否一致,才能进行开启电源;并且要检查或确认好所有的工件都已加固,以免造成在操作过程中工件的滑落或配置松动;并且要检查好电器控制箱内的有无水或油进入以免造成线路运行不畅。操作过程中的注意事项在桁架机械手工作的过程中用户要注意不要将手或手指伸入机械壁的间隙,以免夹伤或压伤甚至造成更严重的事故;也不能伸入机械壁的顶端或配件上面部分;并且在操作过程中不得将手摇晃机械臂以免产生损坏或失灵。机械手的运动速度一般是根据产品的生产节拍要求来决定的,但不宜盲目追求高速度。衢州桁架机械手机器人
模块化机械手设计,快速适应多样化工件搬运。衢州桁架机械手机器人
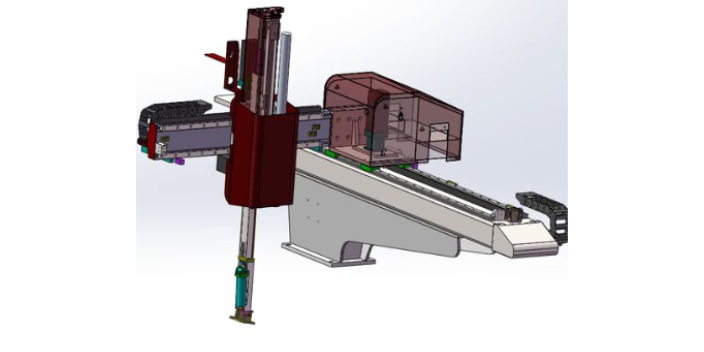
桁架机械手爪机械自锁爪:这种结构很受客户欢迎。机械自锁爪的结构相对简单,但在抓取方面也做了复杂的设计。为了防止夹紧零件时脱落,增加了自锁装置。连杆杠杆爪:从名称上,我们可以将其与其结构联系起来。连杆杠杆爪采用机械连杆机构,通过连杆和杠杆的传动夹紧和释放爪,但该机构有一个缺点,即夹紧力相对较大。齿轮齿条式爪:这种机构具有好的传动性和**快的动作反应速度。它通过齿轮之间的传动控制爪子,可以实现速度的突破。衢州桁架机械手机器人