
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
目前,能源危机、环境污染问题迫在眉睫。纯电动汽车具有无污染、零排放两大优点,因此,研发和推广纯电动汽车技术是有效缓解能源危机和解决环境问题重要途径。而对于动力总成简单的纯电动汽车来说,整车控制器(VCU)的研发十分关键,直接影响车辆的动力性、经济性和安全性。目前,企业对电控系统的开发效率提出更高要求,传统的手写代码开发方式,由于开发周期较长、调试难度较大,逐渐不适用于现代电控系统的开发。因此,为了开发高性能和高效率的整车控制器,本文根据某纯电动汽车的开发需求,基于“V”模式开发流程,以Matlab/Simulink作为开发平台,进行整车控制器软件开发,并进行HIL测试和实车验证。01、整车控制器软件开发以某纯电动汽车为研究平台,基于32位微处理器SPC5634整车控制器(图1),根据相关通信需求和控制需求,进行控制器软件开发。图2为整车控制器架构图,主要由输入输出模块、电源电路以及CAN通讯模块组成。电源主要是由24V车载蓄电池提供;输入模块包括档位信号、制动信号、充电信号、加速踏板开度、制动踏板开度,以及电池电压信号等;输出模块是控制继电器,一般由DCDC、PTC、PDU及水泵继电器等组成;CAN通讯模块主要作用是根据控制需求。汽车面漆检测设备采用环保设计,降低涂装过程中的污染。厦门汽车面漆检测设备推荐厂家
汽车面漆检测设备
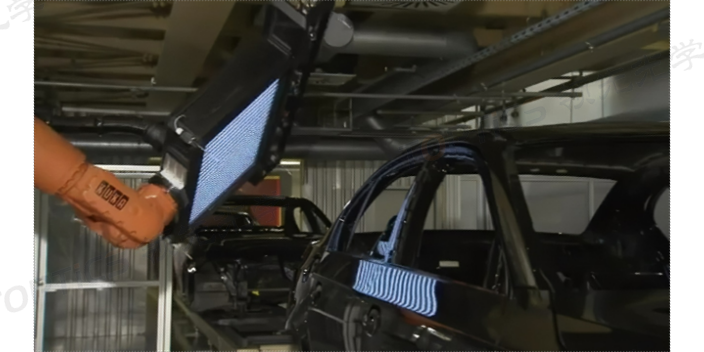
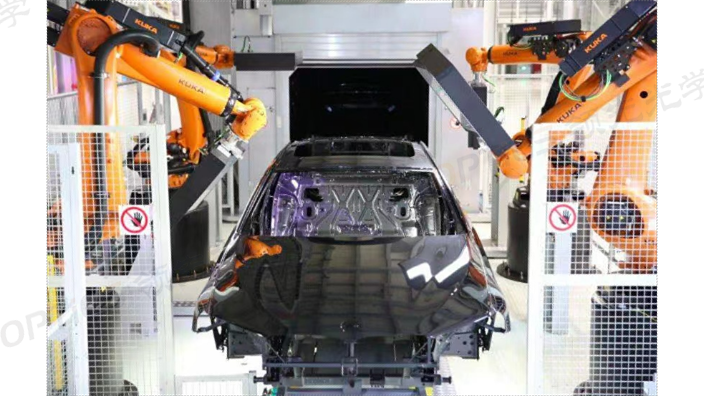
机器人式缺陷检测系统采用机器人来布置光源和相机。该系统的检测硬件由4台搭载检测单元的机器人组成,安装在面漆烘房出口的在线检查工位。检测单元将光源和相机集成在一个单元中.亮点是一块可显示不同光源模式的LED显示屏。车身的每一处位置会通过不同的光源模式(单色光、条纹光等)在不同方向上进行多次检测,通过叠加采样实现2D图像+3D轮廓的图像识别方式。机器人式缺陷检测系统可以实现小,比较大可实现单线60JP1的检测能力,单线投资1500~2000万元。机器人式缺陷检测系统识別精度高,受益于其多次检测+叠加采样的图像采集方式,对于凹凸、缩孔等3D缺陷识别效率较高。但鉴套系统结构较复杂,1个检测站需要配置4台机器人,针对多车型需要分别进行轨迹示教,投资维护成本较高。包头汽车面漆检测设备品牌汽车面漆检测设备采用智能化操作界面,方便用户快速上手。
本发明涉及汽配领域,尤其是一种汽车外漆修补抛光一体机。背景技术:随着社会的进步和经济的发展,汽车进入了千家万户,汽车再驾驶过程中难免存在磕碰划痕,传统的划痕修补方法需要将划痕周边贴上纸张避免补漆时造成周边汽车表面油漆被污染,这种方法操作不便且容易损坏汽车表层油漆,传统的补漆设备需要人手动喷涂,导致喷涂不均匀,因此有必要设置一种汽车外漆修补抛光一体机改善上述问题。技术实现要素:本发明的目的在于提供一种汽车外漆修补抛光一体机,能够克服现有技术的上述缺陷,从而提高设备的实用性。本发明解决其技术问题所采用的技术方案是:本发明的一种汽车外漆修补抛光一体机,包括机身以及设置于所述机身底壁内开口向下的转动腔,所述转动腔圆周壁内设置有开口向下的环形滑槽,所述环形滑槽内可滑动的设置有用于防止油漆扩散的密封罩,所述密封罩与所述环形滑槽顶壁间设置有顶压弹簧,所述转动腔内可转动的设置有转动架,所述转动架底壁内设置有左右对称两个开口向下的滑动槽,所述滑动槽内可滑动的设置有滑动块,左右两个所述滑动槽之间设置有传动腔,所述传动腔内可转动的设置有螺纹套,所述螺纹套内设置有左右贯通的螺纹孔。
漆面缺陷检测算法检测算法识别漆面缺陷的过程分以下4步:图像采集、预处理、特征提取和分类决策。图像采集是指通过检测系统获取到的车身不同部位漆面的图像信息。预处理主要是指图像处理中的灰度化处理、图像滤波、裁剪分割、形态学处理操作,去除非必要检测区域,加强图像的重要特征,使缺陷特征更容易被提取出来。特征提取是指采用某种度量法则,进行缺陷特征的抽取和选择,简单的理解就是将图像上的漆面缺陷与正常漆面,利用某种方法将它们区分开。分类决策是指构建某种识别规则,通过此识别规则可以将对应的特征进行归类和判定,主要应用于漆面缺陷的分类,以指导后续的打磨抛光操作。目前,常用的漆面缺陷检测算法主要分为2类:传统图像算法和深度学习算法。这2种算法的主要区别在于特征提取和分类决策的差异。借助汽车面漆检测设备,实现涂装质量的可追溯与可控制。

深度学习算法主要是数据驱动进行特征提取和分类决策,根据大量样本的学习能够得到深层的、数据集特定的特征表示,其对数据集的表达更高效和淮确、所提取的抽象特征魯棒性更強,泛化能力更好,但检测结果受样本集的影响较大。深度学习通过大量的缺陷照片数据样本训练而得到缺陷判别的模型参数,建立出一套缺陷判别模型,终目标是让机器能够像人一样具有分析学习能力能够识別缺陷。深度学习算法基于TensorFlow和Keras框架,常用的深度学习算法有ResNet、MobileNet、MaskR-CNN和FasterR-CNN等。FasterR-CNN是以RPN(注意力网络)和CNN(卷积神经网络)为算法框架,其中RPN用于生成可能存在目标的候选区域(Proposal),CNN用于对候选区域内的目标进行识别并分类,同时进行边界回归调整候选区域边框的大小和位置使其更精淮地标识缺陷目标。FasterR-CNN相比前代的R-CNN和FastR-CNN比较大的改进是将卷积结果共享给RPV和FastR-CNN网络,在提高准确率的同时提高了检测速度。总体来讲,传统图像算法是人工认知驱动的方法,深度学习算法是数据驱动的方法。深度学习算法一直在不断拓展其成用的场景.但传统图像方法因其成熟、稳定等特征仍具有应用价值。目前。汽车面漆检测设备具备强大的数据存储功能,方便用户随时查看历史数据。丹东非隧道式汽车面漆检测设备源头厂家
借助先进的面漆检测设备,汽车涂装行业迎来品质新飞跃。厦门汽车面漆检测设备推荐厂家
传统图像算法中特征提取主要依赖人工设计的提取器,需要有专业知识及复杂的参数调整过程,分类决策也需要人工构建规则引擎,每个方法和规则都是针对具体应用的.泛化能力及鲁棒性较差。具体到缺陷检测的应用场景,需要先对缺陷在包括但不限于颜色、灰度、形状、长度等的一个或多个维度上进行量化规定,再根据这些量化规定在图像上寻我符合条件的特征区域,并进行标记。传统图像处理有很多算法库,如Halcon、VisionPro和OpenCV等,一般采用编程语言调用算法库的形式来实现。常用的经典检测算法有Roberts算子,Sobel算子,Previtt算子,IOG算子和Canny算子等.Canny算子是1种边缘检测算法,设定了信噪比准则定位精度准则单一边缘响应准则来提高边缘检测精度。为满足这了条准则.CANNYJ在一阶微分算子的基础上,增加了2项改进.即非极大值抑制和双阈值。非极大值抑制能控制多边缘响应和边缘定位精度;双阈值能减少边缘的漏检率。厦门汽车面漆检测设备推荐厂家

物流仓储面临着机遇和挑战。如何在东风汽车现有基础上进一步优化仓储管理,以充分发挥仓储管理战略对企业竞争力的激励作用,变成了东风汽车现今Z紧迫的现实问题。2.东风汽车仓储管理实施现状仓储是在经济全球化与供应链一体化背景下的仓储,是现代物流系统中的仓储,它表示一项活动或一个过程,是以满足供应链上下游的需求为目的,在特定的有形或无形的场所、运用现代技术对物品的进出、库存、分拣、包装、配送及其信息进行有效的计划、执行和控制的物流活动。仓储的目的是为了满足供应链上下游的需求。在生产线上,色差仪和分光光度计通常会被整合进自动化控制系统,实现实时监控和即时反馈;本溪全自动汽车面漆检测设备生产厂家汽车面漆检测...
- 上海工业质检汽车面漆检测设备哪家好 2025-11-20
- 泉州偏折光学法汽车面漆检测设备价格 2025-11-20
- 武汉工业质检汽车面漆检测设备推荐厂家 2025-11-20
- 开封非隧道式汽车面漆检测设备生产厂家 2025-11-20
- 黄石全自动汽车面漆检测设备价格 2025-11-20
- 洛阳快速汽车面漆检测设备质量好价格忧的厂家 2025-11-20
- 襄阳代替人工汽车面漆检测设备供应商 2025-11-20
- 宁德代替人工汽车面漆检测设备哪家好 2025-11-19
- 郑州偏折光学法汽车面漆检测设备供应商家 2025-11-19
- 抚顺快速汽车面漆检测设备 2025-11-19



- 光学方法汽车面漆检测设备推荐厂家 2025-11-14
- 浙江汽车面漆检测设备源头厂家 2025-11-13
- 三明代替人工汽车面漆检测设备 2025-11-13
- 南昌光学方法汽车面漆检测设备源头厂家 2025-11-13
- 襄阳高精度汽车面漆检测设备质量好价格忧的厂家 2025-11-13
- 襄阳工业质检汽车面漆检测设备推荐 2025-11-13





- 马鞍山反射面检测设备质量好价格忧的厂家 03-21
- 上海高铁玻璃面型检测公司 03-21
- 南通工业玻璃面型检测供应商 03-20
- 苏州玻璃面型检测供应商 03-20
- 佛山玻璃面型检测推荐厂家 03-20
- 芜湖硅片抛光面检测设备联系人 03-20
- 翘曲度玻璃面型检测供应商家 03-20
- 广州曲度玻璃面型检测电话 03-20
- 杭州颗粒度检测设备生产厂家 03-20
- 嘉兴在线检测设备报价 03-20