视觉点胶系统的数字化转型进程可以通过以下途径来推进:数据化采集:数字化转型的第一步是通过各种传感器、控制器和相机等设备进行数据采集,获取实时的生产和设备参数数据,在点胶过程中,要采集液体的流速、流量、粘度、温度等关键参数,以便优化点胶流程。数据分析:将实时采集的数据进行处理、分析和展示,例如将点胶结果与设计图进行比较,以便及时发现点胶问题,为生产工艺优化提供参考。机器学习与人工智能:机器学习和人工智能技术可以帮助分析大量的数据,发现点胶过程中的潜在问题,同时也可以根据历史数据预测不同参数下点胶质量的变化趋势,节约调试时间和生产成本。智能化控制:针对点胶过程中的不同环境和不同场景,可以开发智能化的控制算法,实现自动调节控制、自动预警和自动报警,为生产工艺提供更高的效率和精度。视觉点胶系统通过实时监测工件表面特征,保证了准确的胶水涂覆。杭州引导视觉点胶系统咨询
操作人员在设置视觉点胶系统的相关参数时,需要考虑以下几个因素:产品要求:根据具体的点胶产品要求,包括涂胶位置、胶水体积、涂胶路径等方面的要求。操作人员需要了解产品的设计要求,以便正确设置视觉点胶系统的参数。工艺要求:不同的点胶工艺需要需要不同的参数设置。例如,点胶速度、压力、烘烤时间等。操作人员需要根据具体的工艺要求设置相关参数,以确保点胶质量和效率。图像处理:视觉点胶系统利用图像处理技术进行图像分析和特征识别。操作人员需要了解图像处理算法的原理和参数设置的意义,以便根据实际情况进行调整。例如,图像的亮度、对比度、滤波等参数可以影响点胶系统的性能。环境因素:操作人员还需要考虑工作环境的光照条件、背景干扰等因素。这些因素需要会影响图像的质量和准确性,从而影响点胶系统的性能。操作人员可以根据实际情况进行光源调整、背景处理等操作,以提高系统的稳定性和精度。杭州引导视觉点胶系统咨询这种先进系统通过图像处理软件分析工件表面特征,实现高精度的胶水应用。
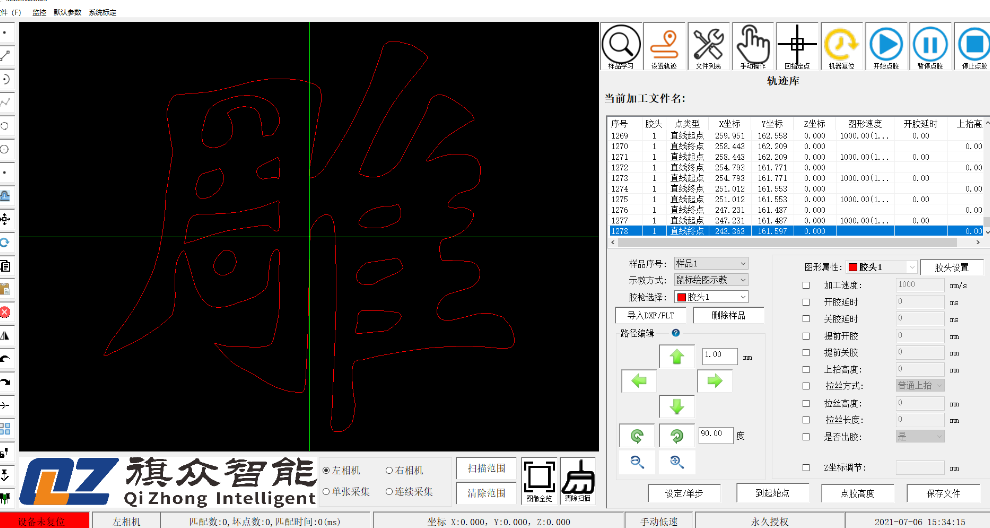
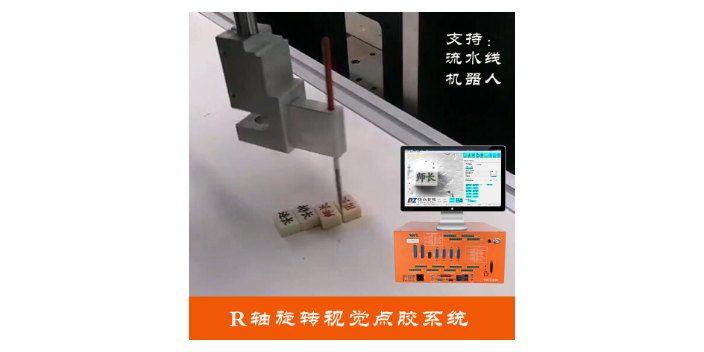
视觉点胶系统与非视觉点胶系统有什么区别:我司的视觉点胶系统采用了我们独有的点胶识别定位系统,支持CAD文件一键导入,无需编程,只需在电脑上简单操作,随意摆放,不需要使用治具,可选多个胶头同时作业,成倍提高工作效率,此外,视觉点胶系统的适用性非常广,可用于接驳流水式、在线式、龙门架式、桌面式、单双工作平台式等不同样式的点胶设备;而非视觉点胶系统则不仅需要使用精密治具,还需要人工示教编程且相对复杂,需要点对点对产品进行编辑,操作麻烦且速度精度受限,所以大家要根据自己的产品需求来进行点胶系统的选择。
视觉点胶系统的安装和调试时间取决于多个因素,包括系统规模、复杂程度和客户要求。下面是一般情况下的安装和调试时间估计:安装时间:通常需要几天到几周的时间来完成系统的物理安装。这包括设备的摆放、传感器和摄像头的安装、电气接线等。软件配置和编程:视觉点胶系统需要进行软件配置和编程,以确保系统正常运行并符合客户要求。这一过程通常需要几天到几周的时间,具体取决于系统复杂度和客户需求的定制程度。调试和优化:安装完成后,需要进行调试和优化以保证系统的性能和精度。这个阶段需要需要几天到几周的时间,以确保点胶位置准确、速度和压力适宜,并进行一些测试和验证。视觉点胶系统的高精度和稳定性使得其在精密仪器制造中备受青睐。
在视觉点胶系统中,虽然现代的算法和技术已经极大地改善了系统的准确性和可靠性,但仍然需要会出现一些判断错误。以下是一些常见的判断错误:假阳性错误:在判断点胶位置和质量时,系统错误地将无需点胶的区域标记为需要点胶,导致多余的胶水施加。这需要是由于图像处理中的噪声、光照变化或表面反射特性等因素引起的。假阴性错误:系统未能检测到需要点胶的区域,导致少量或未点胶的位置。这需要是由于图像处理中的图像分辨率不足、检测算法的灵敏度设置不当或物体表面特性的变化等原因引起的。点胶位置偏差:系统在点胶位置控制上出现偏差,使得点胶位置与目标位置不匹配。这需要是由于机械结构的误差、控制系统的延迟或图像处理算法的误差等因素引起的。点胶质量误判:系统未能准确判断点胶的质量,导致胶水过多或过少。这需要是由于图像处理算法对胶水的特征提取不准确或对胶水流动性的判断不准确等原因引起的。该系统的高效率胶水应用使生产线能够快速满足客户需求,提升了企业的生产能力。上海视觉点胶系统推荐厂家
视觉点胶系统的自动调节功能大幅提升了生产线的智能化水平。杭州引导视觉点胶系统咨询
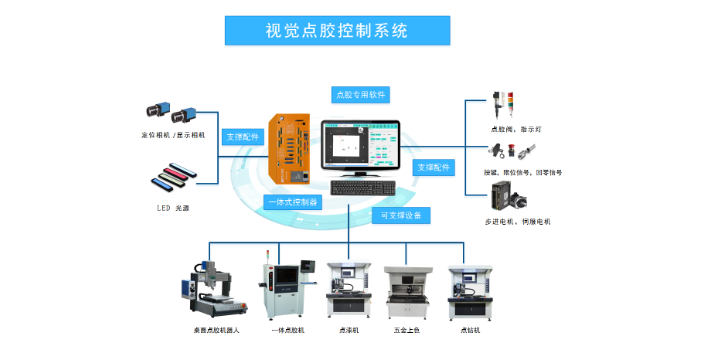
视觉点胶系统通过以下步骤来确定点胶的位置和路径:图像获取:系统使用摄像头或激光传感器获取工作环境中的图像信息。这些图像可以是工件表面的照片或激光扫描得到的三维点云数据。图像处理:系统使用高效的图像处理软件对获取的图像进行分析和处理。图像处理可以包括噪声过滤、边缘检测、形状匹配等算法,以提取出图像中的特征信息。特征识别:系统对处理后的图像进行特征识别,包括识别工件的形状、大小、位置以及其他关键特征。这些特征可以通过比较图像中的特征与预设的模板或标准来进行匹配。点胶位置计算:基于识别到的特征信息,系统计算点胶的位置。这通常涉及到将图像中的特征坐标映射到工件的实际坐标系中,以确定点胶的目标位置。杭州引导视觉点胶系统咨询