接连轨道操控方法(CP)是一种对打磨机器人末端执行器在工作空间中的位置和姿态进行连续控制的方法。该方法要求打磨机器人严格遵循预设的轨道和速度,在一定的精度范围内进行运动,且速度可控,轨道平滑,运动平稳,以完成作业任务。在这种操控方式下,打磨机器人的各个关节需要连续、同步地进行相应的运动,从而使其末端执行器形成连续的轨道。该操控方法的主要技术指标包括打磨机器人末端执行器位姿的轨道跟踪精度及运动的平稳性。因此,这种操控方法普遍应用于弧焊、喷漆、去毛边和检测作业等机器人领域。打磨机器人在航空航天领域发挥着重要的作用。南京工业机器人打磨
柔性打磨力控系统能够确保批量生产中的工件表面效果更加均匀一致。这不仅有助于提升良率,减少不良品率,还能降低后续修磨成本,进一步压缩生产成本。该系统简化了机器人的编程示教过程,使得调试效率得到明显提高。这意味着操作人员无需具备高超的编程技能,也能轻松完成机器人的编程和调试工作,从而降低了对操作人员的要求,减少了人力成本。柔性打磨力控系统还具备数据存储和调用功能,使得打磨抛光过程可以纳入数字化产线系统。这一功能不仅有助于实现生产过程的数字化管理,还能提升生产数据的可追溯性,为企业的持续改进提供有力支持。连云港电打磨机打磨抛光机器人在品质控制方面有着独特的优势。

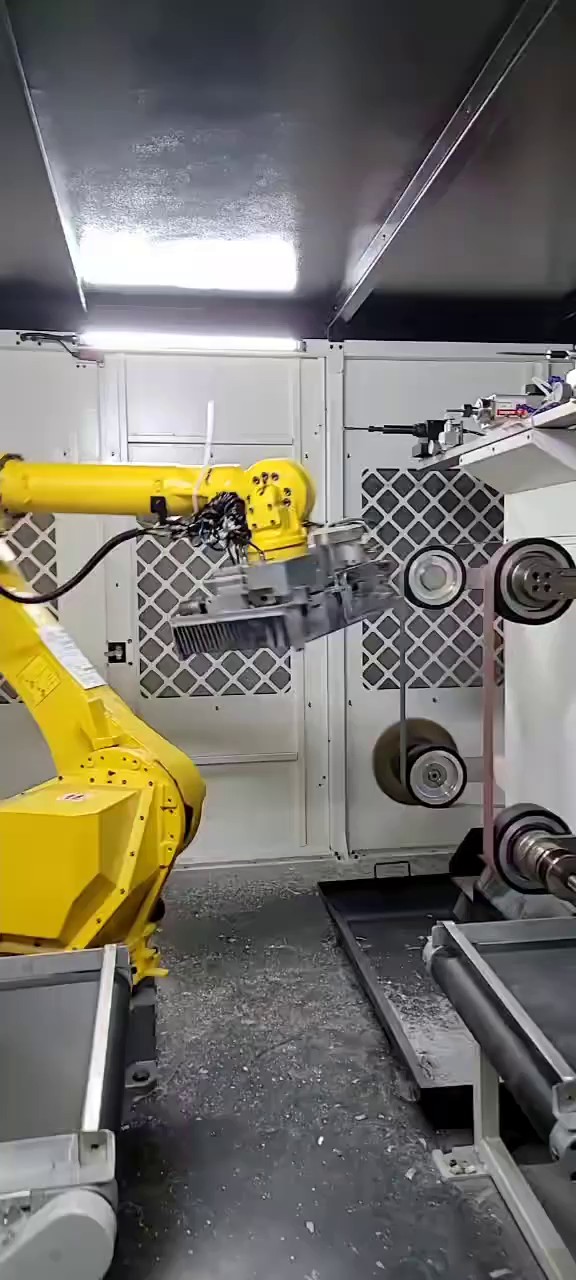
传统的金属制品生产中,打磨抛光工作通常由熟练工人使用电、气动研磨工具手工完成。然而,打磨机器人能够替代人工完成这一工作,从而降低了对熟练工人的依赖,减少了人力成本。抛光打磨过程中会产生易燃易爆的粉尘,这对工人的身体健康构成了严重威胁。打磨机器人能够替代人工进行打磨抛光,从而避免了工人直接接触粉尘,降低了职业健康风险。近年来,打磨抛光粉尘引发的事故频频发生,给人们的生命财产安全带来了严重威胁。打磨机器人的使用能够减少这种事故的发生,保护人们的生命安全,减少财产损失。打磨机器人具有离线编程、多材质处理、降低人力成本、减少职业健康风险以及降低事故风险等多重优势,是金属制品生产中不可或缺的重要设备。
压铸成型的工件外尺寸往往存在误差。当使用固定的切削路径进行加工时,这些尺寸误差同样会导致切削效果的不均匀。过切或切削不足的情况在这种背景下是无法完全避免的,这也是当前许多机器人去毛刺设备在实际应用中效果不佳或失败的主要原因。因此,要优化和提升机器人去毛刺的加工效果,不仅需要关注硬件方面的因素,如刀具、主轴转速和切屑速度等,还需在机器人的编程和示教过程中,尽量减少人为误差,提高点位的精确性。针对压铸件尺寸误差的问题,也需通过更加智能和灵活的切削路径规划来加以解决。这些措施的综合应用,将有助于明显提升机器人去毛刺的加工效果,从而满足更高标准的生产要求。机器人打磨技术可以通过自动化和智能化的手段,提高产品质量,并减少人工操作的风险。

在工业制造领域,随着产品质量的不断提高,制造工艺要求也日益严苛,工业机器人单纯依靠传统的位置控制已经无法满足某些高精度、高复杂度的操作需求。比如,在进行精密零部件的柔性装配,或是对一致性较差的复杂曲面进行打磨时,传统位置控制方式的局限性就暴露无遗。尤其是在处理一致性较差的复杂曲面时,由于位置误差可能导致工件或机器人本身受到损坏。柔性打磨力控系统,作为单独的控制执行系统,专注于抛光打磨领域,旨在解决自动化升级过程中的重要挑战,并为客户提供多方面的成本降低和效率提升方案。打磨机器人的使用寿命较长,可靠性较高,可以为企业长期节约成本。铸件打磨设备报价
打磨机器人在工作过程中,紧固件可能会松动或变形。南京工业机器人打磨
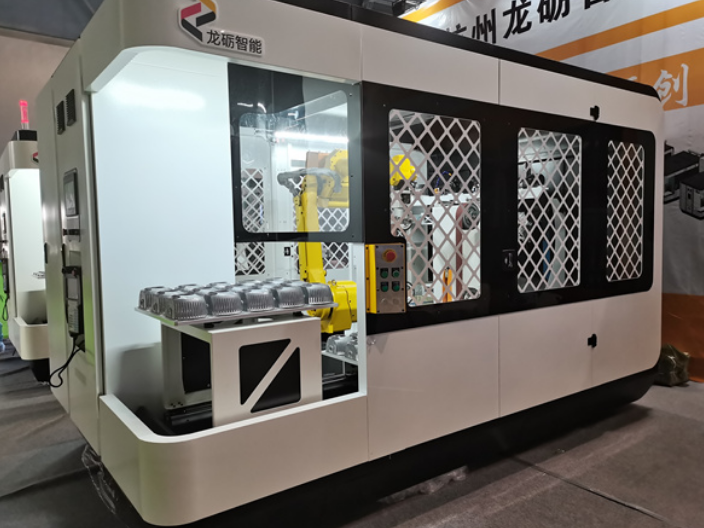
对于企业财产而言,安全则意味着整个生产过程的稳定与可控。自动化生产线的一个明显特点就是其规律性,这种规律性为生产过程的稳定与可控提供了坚实的基础。机器人抛光打磨的应用,就是机器换人技术的一个具体体现。它们能够准确地执行预设的任务,从而替代人类在恶劣的工作环境中进行操作。机器人工作站的设计充分考虑了安全因素。在工作站外部,设置了安全防护栏,确保非操作人员无法进入危险区域。而工作站内部,则配备了先进的传感与驱动控制装置,这些装置能够实时监测机器人的工作状态,并在必要时进行自动调整或停机,从而确保整个工作过程的稳定与安全。南京工业机器人打磨