协作机器人(collaborativerobot,简称cobot或co-robot),是为与人直接交互而设计的机器人,即一种被设计成能与人类在共同工作空间中进行近距离互动的机器人。传统工业机器人是在安全围栏或其他保护措施之下,完成诸如焊接、喷涂、搬运码垛、抛光打磨等高精度、高速度的操作。而协作机器人打破了传统的全手动和全自动的生产模式,能够直接与操作人员在同一条生产线上工作,却不需要使用安全围栏与人隔离。协作机器人的主要特点有:(1)轻量化:使机器人更易于控制,提高安全性。(2)友好性:保证机器人的表面和关节是光滑且平整的,无尖锐的转角或者易夹伤操作人员的缝隙。(3)部署灵活:机身能够缩小到可放置在工作台上的尺寸,可安装于任何地方。(4)感知能力:可感知周围的环境,并根据环境的变化改变自身的动作行为。(5)人机协作:具有敏感的力反馈特性,当达到已设定的力时会立即停止,在风险评估后可不需要安装保护栏,使人和机器人能协同工作。(6)编程方便:对于一些普通操作者和非技术背景的人员来说,都非常容易进行编程与调试。(7)使用成本低:基本上不需要维护保养的成本投入,机器人本体功耗较低。达明机器人(上海)有限公司致力于提供AI协作机器人,有需要可以联系我司哦!珠海移动搬运AI协作机器人模型
从技术上讲,协作机器人可以是任何形式的机器人。然而,六轴设计是几乎所有协作机器人都可以商用的形式。这种设计使协作机器人为的应用做好了准备。协作机器人与工业六轴机器人还有一些明显的区别。它们的设计目的是围绕人工作,与普通工业类型不同。此外,协作机器人更容易与非专业人士交互,包括重新编程和调整机器人的参数。开发环境通常也是图形化和直观的,这与工业机器人更复杂的开发环境相反。与其他工业机器人相比,协作机器人也很轻。这使得它们可以与移动机器人配对,在动态环境中执行任务。协作机器人可能会在一段时间内执行机器维护任务。然后,当其他地方需要时,移动机器人会将协作机器人运送到另一个区域。此时,它可以执行下一个任务。这使协作机器人能够更加灵活地改善您的生产环境。珠海移动搬运AI协作机器人模型AI协作机器人,就选达明机器人(上海)有限公司,用户的信赖之选。

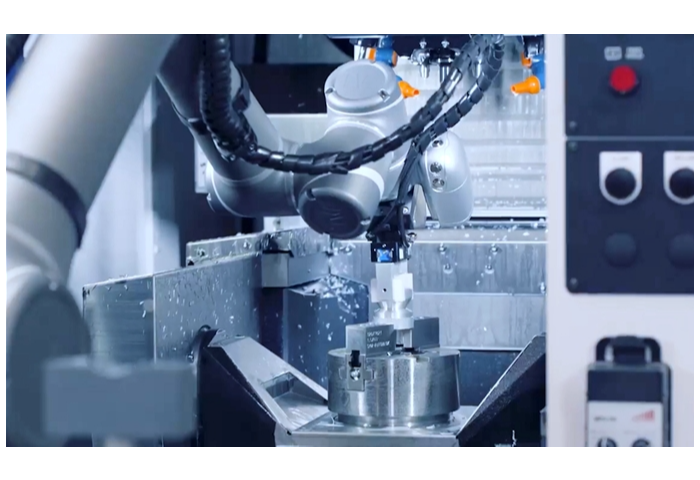
机器维护是协作机器人的另一个有用的应用。尽管将零件和材料装载到机器中的过程通常是一种重复且危险的工作,但目前,大多数机器维护工作仍由人工完成。由于很难找到合格的工人,因此制造商正在采用灵活的机器人解决方案来提高生产率,同时很大程度地减少对工人的危害。机器人可以将材料装载到计算机数控(CNC)铣床、空注塑机中,或将印刷电路板(PCB)插入测试机等。尽管为协作应用设计的机器人可能比常规机器人更轻巧、移动更慢,但是安全措施仍然很重要。碰撞检测技术和低惯性伺服电机等功能,有助于很大程度地降低风险,但并不能完全消除风险。必须通过针对各种应用的风险评估来识别风险,并且必须执行适当的培训和安全措施。需要确定的潜在风险,包括运行人员状况(例如疲劳或压力),在障碍物(例如建筑结构)周围的间隙,可预见的接触以及这种接触的后果,与工作区域相关的其他危险,以及滥用或缺乏运行人员培训等情况。运行人员也需要了解机器人经过的路径和过程。
中小企业(SmallandMediumEnterprises)以欧洲为例,规划化的工业生产转移之后,欧洲无法转移的有非常多的中小企业(SmallandMediumEnterprises)。中小企业是世界各经济体的重要组成部分。各经济体对中小企业的界定标准不尽相同,且随着经济的发展而动态变化,但中小企业在经济体中扮演的关键角色却不容置疑。在欧洲,商业活动的95%以上由中小企业完成,60%-70%以上的雇员服务于中小企业。在美国,中小企业数量已占全部企业总数的,除务农人员外约有,其中50%在中小企业工作。例如食品行业在欧洲就是一个存在的行业,它供应在欧洲居民每天食用的奶酪、面包、蔬菜等,由于供应量和保质期的原因,其生产不可能转移到其他国家,这样这些生产就必须要保留在本地。达明机器人(上海)有限公司AI协作机器人服务值得放心。

协作机器人是工业机器人中的一个重要的细分类别,它的比较大优势就是灵活性,但缺点也非常明显。就是为了获得控制力碰撞能力,协作机器人的运行速度比较慢,一般就只能传统工业机器人的1/3到2/3。而且协作机器人重量都是比较轻,结构相对简单,整个机器人的刚性不足,所以协作机器人负载一般都是比传统工业机器人低,工作范围只与人的手臂差不多。协同机器人在3C行业中,应用非常的,在电子产品的生产中涉及到的焊接、装配、打磨、检测等复杂的工序过程,为了跟上产品更新的速度,又要保证产品的生产品质,人机协作就成为当前理解的解决方案。AI协作机器人,就选达明机器人(上海)有限公司,用户的信赖之选,欢迎新老客户来电!广东智慧AI协作机器人
AI协作机器人,就选达明机器人(上海)有限公司,让您满意,有想法可以来我司!珠海移动搬运AI协作机器人模型
其他协作机器人还具有针对不同加工任务的不同末端执行器,例如各种胶水分配器等。加工作业是指任何需要利用工具操作工件的作业过程。协作机器人常用于胶合处理、分配和焊接过程。这其中的每种加工任务都要求使用工具重复完成固定路径。这些任务如果使用新员工需要投入大量时间进行训练,才能达到成品要求。而使用协作机器人后,可以通过在一台机器人上完成编程后复制给其他机器人。协作机器人同时还解决了工人完成的精度和重复操作的问题。传统的焊接机器人系统,通常需要操作人员具有非常专业的机器人编程和焊接知识。而协作机器人系统的优势是,简化编程,通过地点和方位记录的方法或传统的CAD/CAM编程就可以实现,简化了机器人编程,让有焊接经验的工人也能完成协作机器人的编程。采用Polyscope的接口可以帮助维持稳定的TCP速度,保证了机器人可以以恒定的速度投入原料。这种情况根据固定焊枪、密封胶、胶水、或焊膏种类的不同,机器人应用的末端器执行器也各不相同。珠海移动搬运AI协作机器人模型